

伺服系统调试步骤
伺服与控制
描述
伺服系统—机电一体化关键技术
“伺服机构系统”源自servomechanism system,系指经过闭环控制方式达到一个机械系统位置、速度、或加速度控制的系统。一个伺服系统的构成通常包含被控对象(plant)、驱动器(actuator)、控制器(controller)等几个部分,被控对象系指被控制的物体,例如一个机械手臂,或是一个机械工作平台。驱动器的功能在于主要提供被控对象的动力,可能以气压、液压、或是电力驱动的方式呈现,若是采用液压驱动方式,一般称之为液压伺服系统。目前尽大多数伺服系统采用电力驱动方式,驱动器包含了电机与功率放大器,特别设计应用于伺服系统的电机蒙古自治区称之为伺服电机(servo motor),通常内部含有位置反馈装置,如光电编码器(optical encoder)或是旋转变压器(resolver),目前主要应用于产业界的伺服电机包括直流伺服电机、永磁交流伺服电机和感应交流伺服电机,其中又以永磁交流伺服电机占尽大多数。控制器的功能在于提供整个伺服系统的闭环控制,如转矩控制、速度控制和位置控制等。目前一般产业用伺服驱动器(servo drive)通常包含了控制器和功率放大器。
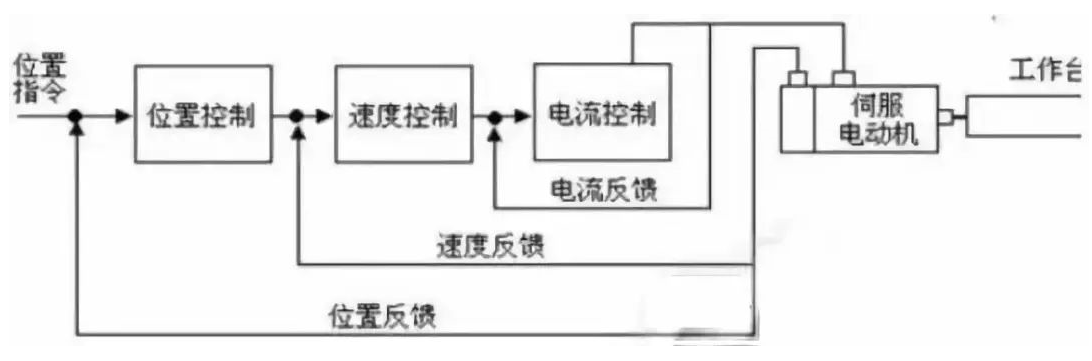
一个传统伺服机构系统的组成如图1所示,伺服驱动器主要包含功率放大器与伺服控制器,伺服控制器通常包含速度控制器与转矩控制器,电机通常提供模拟式的速度反馈信号,控制界面采用±10V的模拟信号,经过外回路的模拟命令,可直接控制电机的转速或转矩。采用这种伺服驱动器,通常必须再加上一个位置控制器(position controller)才能完成位置控制。图2所示是一个现代的伺服机构系统结构图,其中的伺服驱动器包含了伺服控制器与功率放大器,伺服电机提供高分辨率的光电编码器反馈信号。
什么是伺服系统?
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),其结构组成和其他形式的反馈控制系统没有原则上的区别。
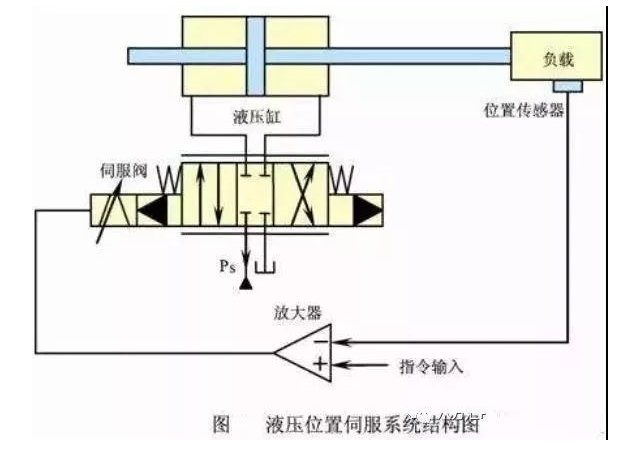
注意:伺服系统不单单指以伺服电机构成的电气伺服系统,还有以伺服阀构成的液压伺服系统。
伺服系统调试步骤
初始化参数
在接线之前,先初始化参数。在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
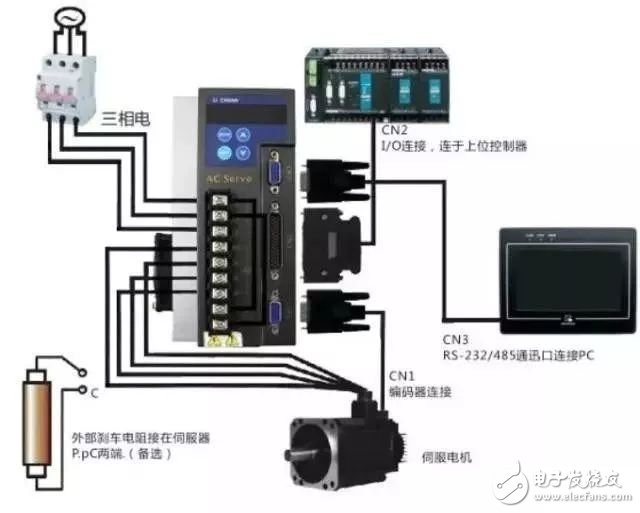
接线
将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,伺服电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
试方向
对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
抑制零漂
在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
建立闭环控制
再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。
调整闭环参数
细调控制参数,确保电机按照控制卡的指令运动,这是必须要做的工作,而这部分工作,更多的是经验,这里只能从略了。
-
伺服系统调试经验分享及常见问题分析与解决方法2026-03-12 1078
-
伺服系统调试技巧与注意事项2024-12-10 2486
-
伺服系统原理及分类2023-08-27 4793
-
交流伺服系统的分类及应用场合2023-03-07 2346
-
A6伺服系统的接线与调试2023-01-12 6645
-
伺服系统的组成及分类2021-02-22 2454
-
PLC控制伺服系统步骤_西门子PLC控制的伺服控制系统详解2018-06-01 56013
-
伺服系统应用于哪儿_伺服系统应用实例2018-05-31 18030
-
伺服系统什么意思_伺服系统的作用是什么2018-04-28 35668
-
伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成2018-03-27 25387
-
伺服系统的组成2016-04-26 1153
-
伺服系统介绍2011-07-10 3062
-
进给伺服系统2009-02-16 917
全部0条评论

快来发表一下你的评论吧 !
