

伺服电机驱动器参数设置的方法与技巧
伺服与控制
描述
随着各种技术的不断更新,我国的数控系统和伺服驱动器在最近几年也有了较大的发展,现在伺服驱动器在自动化生产设备中经常用到,掌握伺服驱动器参数设置的方法是现代化生产中必备的一个技能。
伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。
在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
伺服电机驱动器参数设置的方法与技巧
以KNDSD200-20伺服电机驱动器为例,说明其基本参数的设置方法与技巧。
1.驱动器基本功能
KNDSD200-20伺服电机驱动器采用国际上先进的数字信号处理器(DSP)、大规模可编程门阵列(FPGA)、新一代智能化功率模块(1PM)等组成。集成度高,体积小。具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。调速比宽 1:5000;转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。采用全数字控制,控制简单灵活。用户可以通过设定用户参数,对伺服的工作方式、运行特性作出适当的任意组态。例如:可以组成位置控制系统、速度控制系统、转矩控制系统等。
2.驱动器基本参数
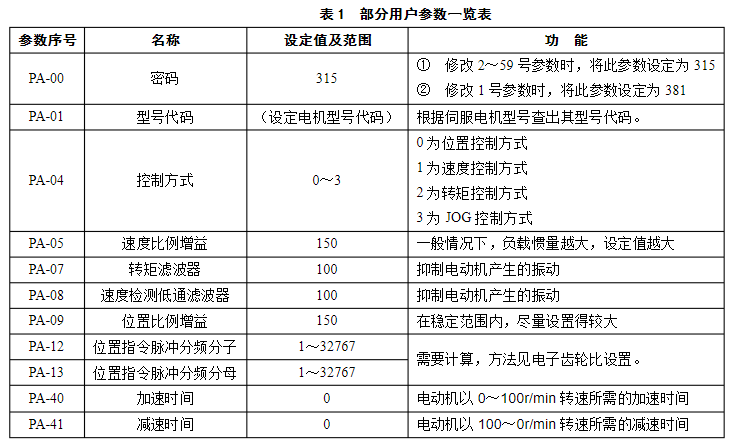
伺服电机驱动器一般为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。用户可以根据不同的现场情况调整参数,以达到最佳控制效果。几种常用的参数的含义是:
(1)“0”号参数为密码参数,出厂值315,用户改变伺服电机型号时必须将此密码改为385。
2)“1”号参数为型号代码,对应同系列不同功率级别的驱动器和电动机。
(3)“4”号参数为控制方式选择,改变此参数可设置驱动器的控制方式。其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。
(4)“5”号参数为速度比例增益,出厂值为150。此设置值越大,增益越高,刚度越大。参数设置根据具体的伺服驱动器型号和负载情况设定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡情况下,应尽量设定较大些。
(5)“6”号参数为速度积分时间常数,出厂值为20。此设定值越小,积分速度越快,太小容易产生超调,太大使响应变慢。参数设置根据具体的伺服驱动型号和负载确定。一般情况下,负载惯量越大,设定值越大。
(6)“40”、“4l”号为加减速时间常数,出厂设定为0。此设定值表示电动机以0~100r/min转速所需的加速时间或减速时间。加减速特性呈线性。
(7)“9”号参数为位置比例增益,出厂没定为40。此设置值越大,增益越高,刚度越高,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值根据具体的伺服驱动型号和负载情况而定。
SD200伺服驱动器和凯恩帝数控系统相配时,只需设定表1中的参数,其余参数,一般情况下,不用修改
电子齿轮比的设置
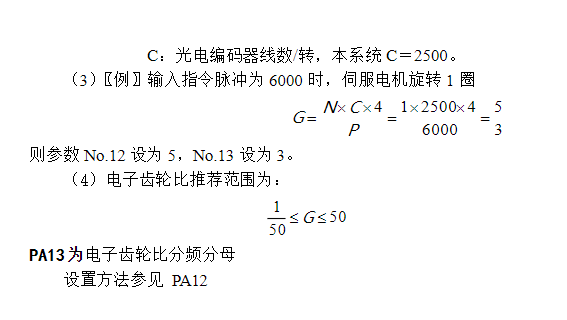
PA12 为电子齿轮比分频分子
(1)设置位置指令脉冲的分倍频(电子齿轮)。
(2)在位置控制方式下,通过对No.12,No.13参数的设置,可以很方便地与各种脉冲源相匹配,以达到用户理想的控制分辨率(即角度/脉冲)。
P×G=N×C×4
P:输入指令的脉冲数; G:电子齿轮比; N:电机旋转圈数;
-
伺服驱动器需要设置哪些参数2024-07-13 8981
-
伺服电机旋转方向参数设置方法2024-06-12 5737
-
安川伺服pn600参数设置方法2024-06-06 4521
-
东元驱动器参数设置步骤及注意事项2024-04-12 5747
-
伺服电机驱动器设置参数教程2024-01-25 13630
-
步进电机驱动器参数设置 步进电机驱动器常见故障维修2024-01-24 12642
-
伺服驱动器怎么设置参数2024-01-11 8034
-
伺服驱动器的参数设置方法和故障排查技巧2023-05-24 12586
-
教你设置伺服驱动器的8大参数2023-05-17 23092
-
伺服控制器的参数设置_伺服控制器报警代码2023-03-12 10471
-
添加伺服轴的参数设置2023-03-08 3900
全部0条评论

快来发表一下你的评论吧 !
