

增量式编码器工作原理_增量式编码器的应用
电子说
描述
增量式编码器工作原理
增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。
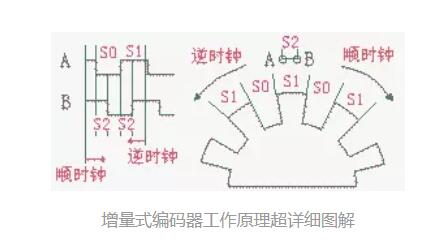
图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。
当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为:
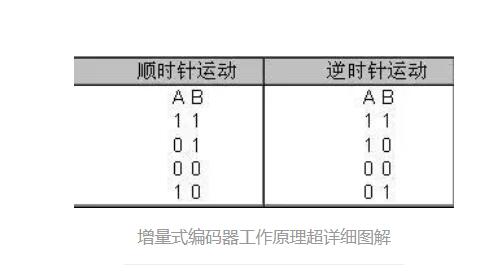
我们把当前的A、B输出值保存起来,与下一个到来的A、B输出值做比较,就可以得出角度码盘转动的方向,
如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,再除以所用的时间,就得到此次角度码盘运动的角速度。
S0等于S1时,且S2等于S0的1/2时,1/4个运动周期就可以得到运动方向位和位移角度,如果S0不等于S1,S2不等于S0的1/2,那么要1个运动周期才可以得到运动方向位和位移角度了。
我们常用的鼠标的滚轮也是这个原理。
实际使用的增量式编码器输出三组方波脉冲A、B和Z(有的叫C相)相。A、B两组脉冲相位差90º,可以判断出旋转方向和旋转速度。而Z相脉冲又叫做零位脉冲(有时也叫索引脉冲),为每转一周输出一个脉冲,Z相脉冲代表零位参考位,通过零位脉冲,可获得编码器的零位参考位,专门用于基准点定位,如下图所示。
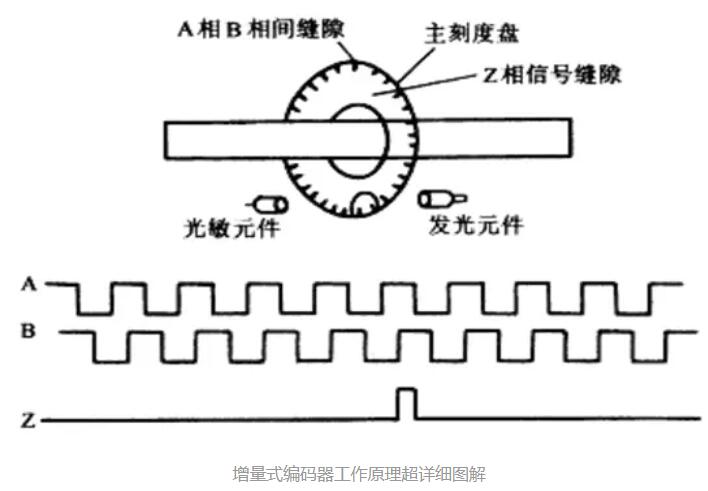
增量式编码器转轴旋转时,有相应的脉冲输出,其计数起点可以任意设定,可实现多圈无限累加和测量。编码器轴转动一圈会输出固定的脉冲数,脉冲数由编码器码盘上面的光栅的线数所决定,编码器以每旋转360度提供多少通或暗的刻线称为分辨率,也称解析分度、或称作多少线,一般在每转5~10000线,当需要提高分辩率时,可利用90度相位差的A、B两路信号进行倍频或者更换高分辩率编码器。
增量型编码器精度取决于机械和电气的因素,这些因素有:光栅分度误差、光盘偏心、轴承偏心、电子读数装置引入的误差以及光学部分的不精确性,误差存在于任何编码器中。
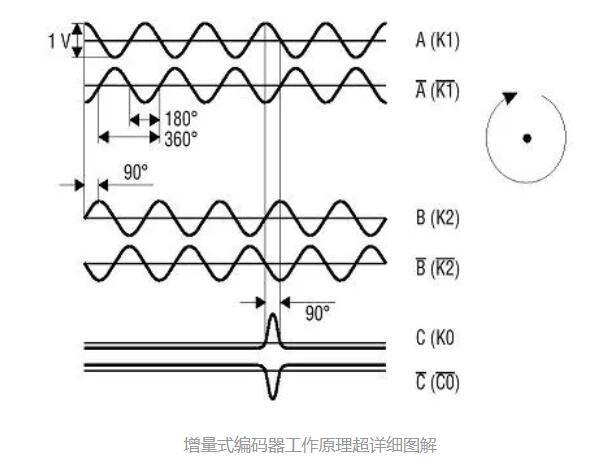
编码器的信号输出有正弦波(电流或电压)、方波(TTL、HTL)等多种形式。并且都可以用差分驱动方式,含有对称的A+/A-、B+/B-、Z+/Z-三相信号,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,信号稳定衰减最小,抗干扰最佳,可传输较远的距离,例如:对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
增量式编码器的应用
增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号, 其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。
增量式编码器主要应用于数控机床及机械附件、机器人、自动装配机、自动生产线、电梯、纺织机械、缝制机械、包装机械(定长)、印刷机械(同步)、木工机械、塑料机械(定数)、橡塑机械、制图仪、测角仪、疗养器雷达等。
-
增量式编码器工作原理是什么?2025-09-29 2952
-
增量式编码器:工作原理、应用与优势解析2024-11-27 4900
-
增量式编码器结构应用与工作原理2024-06-04 4999
-
光纤绝对式和光纤增量式编码器的区别2024-05-15 1503
-
选择增量编码器分辨率的方法,影响增量式编码器分辨率的因素2023-07-26 3987
-
增量式编码器和绝对值编码器有哪些区别?2023-07-05 6309
-
增量式编码器的三种类型介绍2023-04-17 9370
-
增量式编码器和绝对值编码器选哪个?2023-03-19 5597
-
增量式旋转编码器设计2021-12-01 2231
-
STM32-增量式旋转编码器测量2021-11-22 2023
-
单片机读取光栅编码器角度的方法是什么?2021-06-30 2162
-
增量式编码器与绝对式编码器的区别2019-11-06 65381
-
伺服电机编码器绝对式和增量式区别2018-02-05 34983
-
增量式光电编码器2010-06-02 21142
全部0条评论

快来发表一下你的评论吧 !
