

如何利用stm32单片机进行超声波测距
控制/MCU
描述
首先来看模块图
在某宝上一搜就能找到,关于它的使用也是非常简单,先看数据手册里面需要注意的几点
1 基本的参数
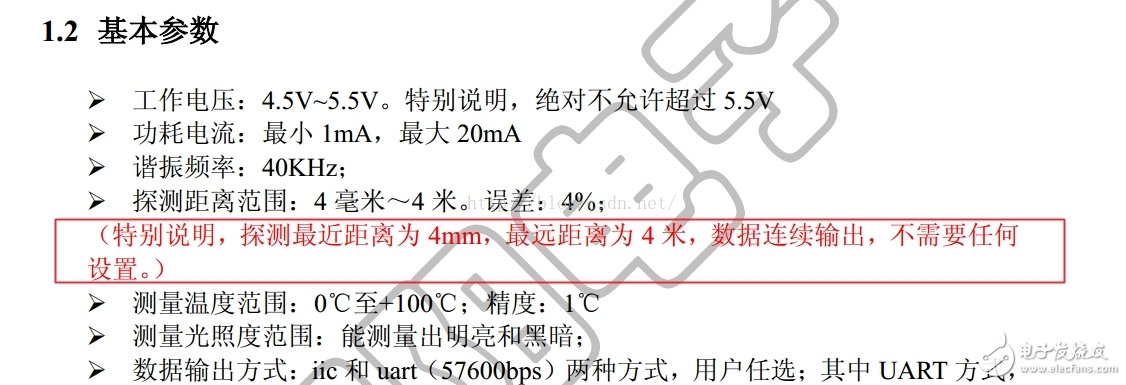
在实际测试当中,最大测量三米多的距离还是可以,最小距离我没有做测试,我测的最小距离是50厘米,再往下没有继续测。
2测距的基本原理

这里的基本原理其实应该是它的使用方法,如果你仔细看它的数据手册会发现这种测距模块还有另外一种使用方法:USART通信。
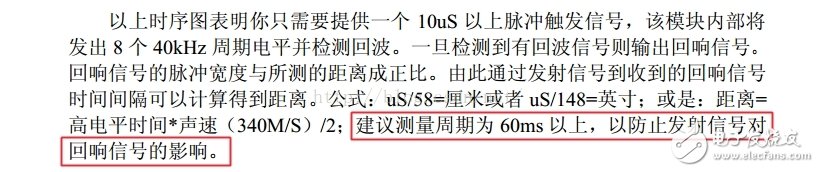
看文字不是很直观,简单粗暴来看图
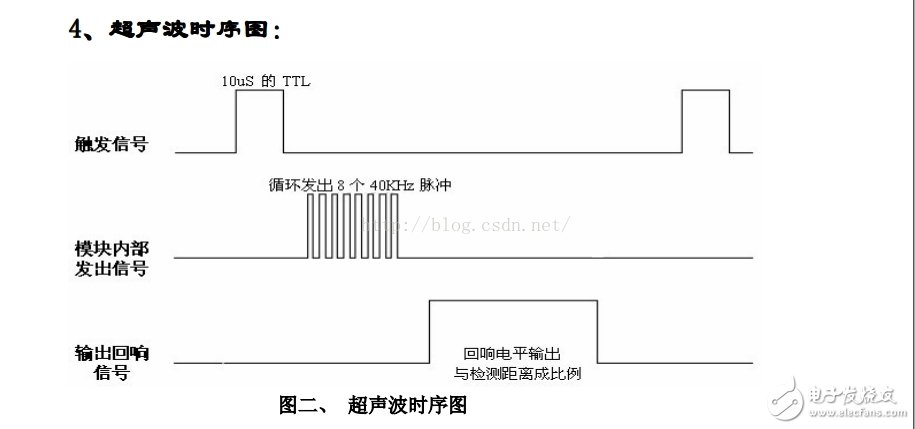
在写程序的时候没有使用USART的方法,因为上图的这种驱动方式我认为比较简单,后面的程序也是按照这个时序图来编写的。
注意:上图中关于测距的公式,在程序中我没有使用他给的公式,这一点在后面会提到。
3 实物图的连接
实物图的连接就不上图了,购买此模块的时候一般卖家会给你相应的资料。
直接上程序:
主函数:
intmain(void)
{
unsignedintcount=0;
floatdistance=0;
floatdistancebuf[]={0};//这里的数组没有意义,是在调试程序的时候,怕测的距离有误差,把连续几次测到的数值放入数组中求平均值,以提高精度
/*USART1config1152008-N-1*/
USART1_Config();
Distance_Config();//距离转换函数,在上面的说明中有提到,但是具体的实现和上面的公式是不相同的
CLI();//关闭总中断
SEI();//开启总中断
Tim3_Config();//定时器初始化
GPIO_ResetBits(GPIOA,GPIO_Pin_5);//先拉低电平
while(1)
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);//再拉高电平,这里拉低拉高电平是根据上面给出的测距原理来写的
Delay(30);//延时30个us,注意这里使用的是粗略的延时函数,测距原理中说是延时10个us,这里给30个us也无妨
//Delay(20);
//Delay(20);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
TIM3-》CNT=0;//TIM3的计数器清零
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4)==0);//等待ECHO的高电平
TIM_Cmd(TIM3,ENABLE);//运行TIM3进行计数
while((GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4)==1)&&(TIM3-》CNTARR-10));
TIM_Cmd(TIM3,DISABLE);
count=TIM3-》CNT;
printf(“count=%d”,count);
distance=ChangeDistance(count);
printf(“μ±?°?àà??a£o%fn”,distance);
Delay(20000);
Delay(20000);//这里的延时没有具体的意义,可以去掉
while(1);//程序测距一次后卡死在这里
}
}
距离转换函数
floatChangeDistance(unsignedintcout1)
{
floatdistance=0;
printf(“cou1=%dn”,cout1);
distance=cout1/58.0;
returndistance;
}
参数是TIM3-》CNT的计数,也就是高电平的时间,distance是测距距离
注意:distance的单位是厘米
关于转换的公式为什么是cout1/58.0 这里我也不是很清楚
另外:当ECHO引脚输出高电平后,另一种思路是采用上升沿触发定时器中断的方式来计算高电平时间的,我认为没有必要再配置一次中断,使用while()来等待这个高电平的方法完全可以。当然不容忽视的一个问题是,如果始终检测不到高电平,程序会卡死在while()语句这里,因此有必要加上一个时间的判断。
通过串口打印相应的测量结果。
注意:1 有的超声波模块是有温度校准的,有温度校准的模块测距精度要高一些。
2 模块再稳定下来之后测距是比较准确的,即便是我上面写的代码,也需要稳定一下再测距才可以,举个例子,当你将超声波模块对着墙时,刚上电测到的距离并不准确,但是很短时间后测距就会变得非常精准。
3 上面的程序采用的是电平触发的方式,我看到有的说使用串口的方式会使精确度更高,但我没有做相关的实验。
4 想要提高测距精度的另一种方法就是多次测量,去掉最大值,最小值后取平均值的方法,我在另一份程序中采用的是测五次距离,然后取出平均值得方法,需要注意多次测量的周期最好大于60ms。
责任编辑;zl
-
使用SLH89F5162单片机超声波测距显示2013-10-14 0
-
单片机超声波测距2016-04-18 0
-
基于单片机的超声波测距系统设计2016-12-17 898
-
51单片机超声波测距仿真与分析2017-09-04 1168
-
基于STM32单片机的高精度超声波测距系统的设计2017-09-28 1276
-
使用STM32单片机和51单片机实现HC04超声波测距模块的程序免费下载2019-08-21 1328
-
使用51单片机进行超声波测距利用1602显示的程序免费下载2019-07-02 988
-
如何使用STM32单片机进行超声波测距的程序和资料说明2019-05-15 1588
-
STM32单片机的高精度超声波测距系统设计2019-10-17 8522
-
基于51单片机的超声波测距模块设计2019-12-10 7004
-
使用STM32单片机实现超声波测距的完整资料合集2021-03-29 1429
-
51单片机驱动超声波测距模块2021-07-22 1531
-
基于单片机的超声波测距2021-11-12 929
-
52单片机超声波测距2021-11-23 674
-
如何利用51单片机实现一种超声波测距功能呢2022-08-17 3220
全部0条评论

快来发表一下你的评论吧 !
