

嵌入式MultiBus-CPU模块设计可满足工业现场的测控需要
嵌入式技术
描述
引 言
MultiBus-CPU模块是基于AT91RM9200微控制器的智能化多总线测控模块。该CPU模块主要实现对下位机的控制,并建立基于Modbus-RTU总线协议的总线通信体系结构,让系统设备可以无缝接入基于Modbus-RTU模式的总线系统,可靠、实时、准确地实现工业现场数据采集、信号输出等功能;同时,提供标准视频接口用于显示16位色图像,提供标准音频输入输出接口用于实现录放音功能。该模块作为嵌入式开发环境的核心,可实现人机界面的交互操作和显示、海量数据的存储、多串口、多USB口、音频信号输入输出、以太网口等接口;运行Linux操作系统,可以快速搭建面向应用的嵌入式应用系统。
1 MultIBus-CPU模块软件设计方案
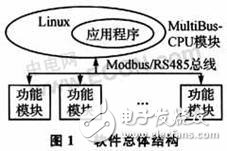
为了满足实际应用对实时性的要求,MultiBus-CPU模块软件采用了Linux 2.6.21操作系统。其中,Linux 2.6的内核任务可以被抢占,这一特性使得Linux 2.6内核适用于实时系统和嵌入式系统中。驱动程序在Linux环境下进行开发,应用层采用标准的通信协议——Modbus协议,控制设备可以连成工业网络进行集中监控。通过一致的Modbus接口,MultiBus-CPU模块与扩展下位机均可作为对等设备在工业网络中进行对话,使得各个设备无缝接人到工业控制网络中。MNtiBus-CPU模块支持现阶段工业测控系统中最常用的以太网(UDP)通信及RS485通信协议。因此,本模块在与其他功能模块进行通信时,采用Modbus-RTU数据通信方式,利用以太网(UDP)/RS485总线进行数据的发送与接收,实现对各功能模块的集中监控。软件总体结构如图1所示。
2 MultiBus-CPU模块硬件设计方案
硬件设计原理图如图2所示。MultiBus-CPU模块选用Atmel公司的AT91RM9200为主处理器,融合了ARM920T ARM Thumb处理器。其工作于180 MHz时性能高达200 MIPS;具备存储器管理单元,可以运行Linux等实时操作系统;具备10/100 Base-T型以太网卡接口,只需外扩一个PHY即可实现以太网通信;具备USB 2.0全速(12 Mb/s)主机双端口,可以扩展键盘、鼠标、U盘等标准外设。
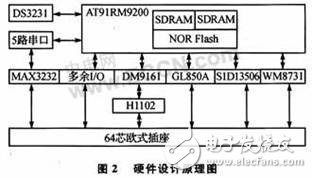
主处理器AT91RM9200具备5个串口:1个DEBUG串口,设计为RS232接口,可以直接连接PC的串口进行调试;1个RS485接口,可以与其他功能模块的RS485接口组成网络;其余3个串口均设计为RS232接口。
通过CPU模块的外部总线和Epson公司的S1D13506显示芯片扩展了一个VGA接口,分辨率为640×480,256色。IS41LVl6100为其提供独立显存,容量为1M×16位,支持EDO PAGE模式。
GL850A芯片是一个低功耗的USB 2.0 HUB控制器,AT91RM9200本身的USB HOST接口通过GL850A芯片扩展为4个USB HOST接口。
DS3231是精度非常高的I2C集成实时时钟。其精度在0~40℃内高达±2 ppm,在-40~85℃内精度可达±3.5ppm;板载电池,掉电后可以保持时间;可为系统提供秒、分、小时、日、日期、月、年等信息,具有自动闰年调整功能。
WM8731是一个低功耗网络音频编解码器(CODEC),具有输出功率放大器和可编程采样速率设定功能。WM8731芯片通过I2S接口与CPU连接,为CPU模块扩展了音频信号的输入输出接口,使系统具备音频采样功能,音频信号数字化后可以通过以太网传送。
DM9161为10/100M快速以太网物理层单芯片收发器,H1102为网络隔离变压器,用于实现10/100M自适应的可靠网络传输功能。
MultiBus-CPU模块通过增加显示控制芯片及其驱动实现了显示接口,系统运行信息可以直接通过VGA显示器显示出来,大大提高了人机交互的可操作性。
3 显示模块硬件设计方案
3.1 接口芯片选择
接口芯片选用Epson公司生产的大规模显示控制器S1D13506。它是以SEDl354控制器为基础发展起来的具有更多功能的LCD显示控制器,支持全类型、大规模的LCD及CRT/TV显示器。S1D13506内置RAMDAC(Random Access Memory Digital-to-Analog Converter,随机数模转换记忆体)硬件X-Y轴转置二维加速器,共有114个寄存器,可以灵活地设置各种不同的显示方式。
3.2 接口硬件设计
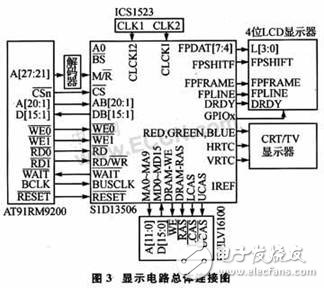
S1D13506与处理器的接口采用通用类型总线(包括数据总线、地址总线、控制总线)。接口定义如表1所列。芯片所用像素时钟CLK1、CLK2是由同步信号发生器ICS1523来提供的,外接1M×16位的EDO-DRAM IS41LV16100。

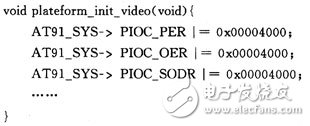
图3是显示电路总体连接图。S1D13506连接到AT9IRM9200的信号有:M/R、AB1~AB20、DB1~DB15、WE0、WE1、RD、RD/WR、CS、RFSET、BUSCLK、WAIT。连接到ICSl523的信号有:CLCKI、CLCK12(用于内部显示及外部媒体接口时钟)。连接到IS41LVl6100的信号有:DRAM-WE、DRAM-RAS、LCAS、UCAS、MA0~MA9、MD0~MD15。其中,MD1、MD2、MD4、MD6、MD15需要外接上拉电阻用于S1D13506初始配置。其他控制信号连接到LCD/CRT显示器。S1D13506芯片有个测试使能引脚TFSTEN在芯片正常工作时接地。如果不使用RAMDAC的数模转换功能,那么IREF引脚必须接地。ICS1523通过I2C串行总线(TWD、TWCK)接受AT91RM9200对它的寄存器配置。本设计中,ICS1523的输入时钟是50 MHz,输出CLK1为25 MHz,CLK2为12.5 MHz。
4 显示模块软件设计方案
4.1 Linux下LCD驱动程序开发
在Linux内核中,设备驱动程序是一个个独立的“黑盒子”,可以使某个特定的硬件响应一个定义良好的内部编程接口,同时完全隐藏了设备的工作细节,用户操作只需要通过一组标准化的调用即可完成。把这些调用映射到设备特定的操作上,则是设备驱动程序的任务。而每一个设备都可以看作是一个文件,所以打开的设备在内核中都可以由一个File结构标识,内核使用File_operations结构访问驱动程序的函数。每个文件(设备)都与它自己的函数集相关联。这些操作函数主要负责上面所提到的系统调用的实现,并因此被命名为open、read、fork、ioctl等。
LCD控制器的功能是显示驱动信号,进而驱动LCD。用户只需要通过读写一系列的寄存器,就可以配置和显示驱动。配置LCD控制器时,最重要的一步是帧缓冲区(FrameBuffer)的指定。帧缓冲区为图像硬件设备提供了一种抽象化处理,它代表了一些视频硬件设备,允许应用软件通过定义明确的界面来访问图像硬件设备。用户程序只需与帧缓冲驱动程序抽象出来的接口打交道,就可以把要显示的内容从缓冲区中读出,从而显示到屏幕上。
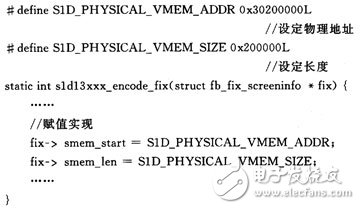
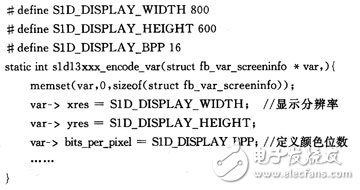
在FrameBuffer驱动程序中,最核心的结构体是帧缓冲区驱动程序接口,即struct fb_info。它记录了当前FrameBuffer硬件设备的状态,通常在Linux的include/Linux/fb.h中定义。最主要的结构体有:Struct fb_fiX_sereeninfo,定义显示输出设备自身的属性,如屏幕缓冲区的物理地址和长度;Struct fb_var_screeninfo,记录帧缓冲设备和指定显示模式的可修改信息,包括显示屏幕的分辨率、每个像素的比特数和一些时序变量。
若要先设定帧缓冲区的物理地址和长度,就要在S1D13506.h里指定,然后在驱动程序里通过对fb_fix_screeninfo赋值来实现:
定义当前显示输出状态,通过对fb_var_screeninfo结构赋值来实现:
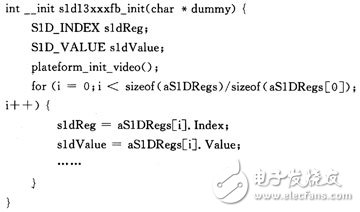
Linux下驱动程序总是先调用module_init(),因此LCD初始化通过调用module_init(sldl3xxxfb_init)来实现。sldl3xxxfb_init初始化函数部分代码如下:
首先对LCD的背光灯进行点亮。LCD显示是一种被动的显示模式,不能发光,只能依靠控制透射或反射周围环境的光来达到显示的目的。因此,必须通过写寄存器用高电平指示对LCD加3.2 V电压来实现背光灯的点亮。其函数的部分代码如下:
系统采用的彩色LCD最佳分辨率是800×600,但通过前面对结构Struct fb_var_screeninfo的赋值并不能真正设定其分辨率。因为结构Struct fb_var_screeninfo的值只是作为一个显示记录来用,必须通过设定寄存器的值才能达到需要的分辨率。本系统在S1D13506.h头文件里用一个数组对寄存器的设置作了一个预定义,然后在初始化函数里利用sldReg和sldValue两个实参写入,从而设定了寄存器的值。
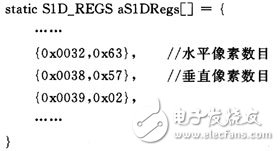
数组里每个元素的第1个值代表寄存器的名称,第2个值代表要设定的数值(1个十六进制的数)。32h寄存器用于设定LCD显示的水平像素数目,计算方法是把第2个值转换成十进制,加1再乘以8就得出水平像素。例如,0x63换算成十进制为99,加1乘以8就是800。38h和39h寄存器分别设置成0x57和Ox02,就可以显示600的垂直分辨率。计算方法是以39h寄存器的bitO和bitl位为高位,38h寄存器的bit0~bit7为低位,组成的一个十六进制的数,再转换成十进制。除了要修改这3个寄存器外,34h和3Ah这两个寄存器也会对显示的分辨率有影响。
帧缓冲设备也属于字符设备,要通过“文件层一驱动层”的接口方式来对LCD进行驱动,就必须对File_operationes数据结构的参数fh_ops进行填充,并实现其对应的成员函数。本系统在include/Limix/fb.h中定义了帧缓冲区的文件操作,部分代码如下:
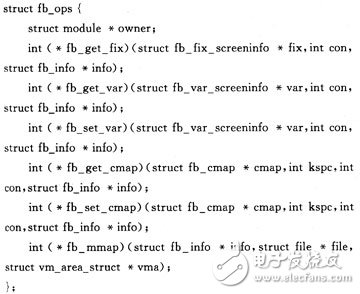
这个结构中的每一个字段都必须指向驱动程序中实现特定操作的函数。对于不支持的操作,对应的字段可以被置为NULL,或留到后续开发时再添加。本模块中实现特定操作的成员函数的代码如下:
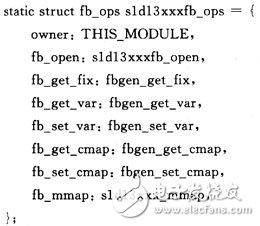
接下来把一些调用的函数写完整,编写好程序后用arm-linux-gcc编译驱动模块;然后对其动态加载,或静态将其编译到Linux内核;加载完程序后,就可以编写应用程序进行读/写等操作了。
4.2 MiniGUI的移植
在嵌入式开发环境中,独立的显示操作人机界面是非常必要的。它可以使嵌入式系统对PC系统的依赖性降到最低,可以直接操作嵌入式系统并显示运行结果。MultiBus-CPU模块采用标准的USB键盘、USB鼠标、VGA显示器作为人机交互界面,使用习惯类同于PC机,简易了开发者的开发过程,并且用户的使用过程也变得简单、快捷、易于操作。
MiniGUI是遵循GPL条款发布的自由软件,其目标是为基于Linux的实时嵌入式系统提供一个轻量级的图形用户界面支持系统。与QT/Embedded、MicoroWindows等其他GUI相比,MiniGUI的最显著特点就是轻型、占用资源少。据称MiniGUI能够在CPU主频为30MHz、仅有4 MB RAM的系统上正常运行,这是其他多种GUI所无法达到的。
MiniGUI在AT91RM9200上的移植包括4个步骤:
①构建Linux交叉编译环境。通常使用的交叉编译工具是arm-Linux-gcc2.95.3版本。下载此交叉编译工具后在Linux内安装好,并且在PATH中添加/usr/local/arm-Linux/bin路径,交叉编译环境就构建好了。
②交叉编译MiniGUI,这是最关键的一步。首先从网上下载MiniGUI源程序包(包括库文件和资源文件),以及其他支持图形界面的源程序包;然后用上一步安装好的交叉编译工具对其进行编译,编译时可指定编译后库文件及资源文件的安装位置。
③拷贝MiniCUI资源到开发板。将第2步编译好的库文件及资源文件拷贝到开发板上。拷贝之前先用arm-Linux-strip命令清除文件中的调试信息,这样就使文件体积大大缩小,可以满足嵌入式系统的需要。
④板载Linux的MiniGUI环境配置。将第2步安装好的MiniGUI配置文件MiniGUI.cfg下载到板子中,并将其中fbcon的defaultmode设置为合适的显示模式。
结 语
本文基于嵌入式技术设计了一种MultiBus-CPU模块,能够满足各种嵌入式开发环境的设计要求。该模块软硬件均采用模块化设计,采用国外广泛应用的ModBus通信协议,可满足工业现场的测控需要。
-
NI工业与嵌入式测控案例精选2013-01-05 4199
-
工程师需要了解的嵌入式Wi-Fi模块选型要素2017-11-22 3928
-
基于Linux的嵌入式工业测控系统该怎么设计?2019-11-05 1578
-
嵌入式Wi-Fi模块选型要素有哪些?2020-07-30 2628
-
435工业现场综合数据采集嵌入式计算机2020-12-29 1718
-
OEM嵌入式通讯模块介绍2021-12-20 1432
-
如何构建一个传感器网络的嵌入式远程测控系统?2022-04-03 6724
-
基于Linux的嵌入式工业测控系统2009-06-10 474
-
基于Java的嵌入式网络测控系统设计2009-09-01 496
-
MiniARM嵌入式工业控制模块选型指南2010-03-27 603
-
基于ModBus协议及嵌入式的MultiBus—CPU模块2010-06-25 1726
-
基于ARM的嵌入式无线工业供水测控系统2017-09-01 698
-
基于Linux的嵌入式系统工业测控系统的设计方案解析2017-11-01 900
-
嵌入式硬件设计中需要注意的事项2019-06-19 1441
-
中科亿海微SoM模组——嵌入式工业现场总线通信控制板2025-06-24 1031
全部0条评论

快来发表一下你的评论吧 !
