

电机的电磁转矩等于输出转矩?
EMC/EMI设计
描述
电机的电磁转矩等于输出转矩?
电动机稳定运行的时候,转子速度不变,意味着它所受到的电磁驱动转矩和负载转矩(也就是实际的输出转矩)已经相等,处于平衡状态。
如果电磁驱动转矩大于负载转矩,则转子还会加速旋转;如果电磁驱动转矩小于负载转矩,则转子会降低转速。这两种情况的转子都是处于不平衡的过渡状态。
转矩类型:
转矩可分为静态转矩和动态转矩。
静态转矩是值不随时间变化或变化很小、很缓慢的转矩,包括静止转矩、恒定转矩、缓变转矩和微脉动转矩。
静止转矩的值为常数,传动轴不旋转。
恒定转矩的值为常数,但传动轴以匀速旋转,如电机稳定工作时的转矩。
缓变转矩的值随时间缓慢变化,但在短时间内可认为转矩值是不变的。
微脉动转矩的瞬时值有幅度不大的脉动变化。
动态转矩是值随时间变化很大的转矩,包括振动转矩、过渡转矩和随机转矩三种。
振动转矩的值是周期性波动的;过渡转矩是机械从一种工况转换到另一种工况时的转矩变化过程;随机转矩是一种不确定的、变化无规律的转矩。
根据转矩的不同情况,可以采取不同的转矩测量方法。转矩=9550*功率/转速同样功率=转速*转矩/9550平衡方程式中:功率的单位(kW);转速的单位(r/min);转矩的单位(N.m);9550是计算系数。
向量叉乘在永磁同步电机电磁转矩计算中的应用
电流和磁场的相互作用产生电磁转矩,利用叉乘可以很方便地推导出永磁同步电机的电磁转矩,包括表贴式永磁同步电机(SPMSM)和内嵌式永磁同步电机(IPMSM),具体如下图所示。
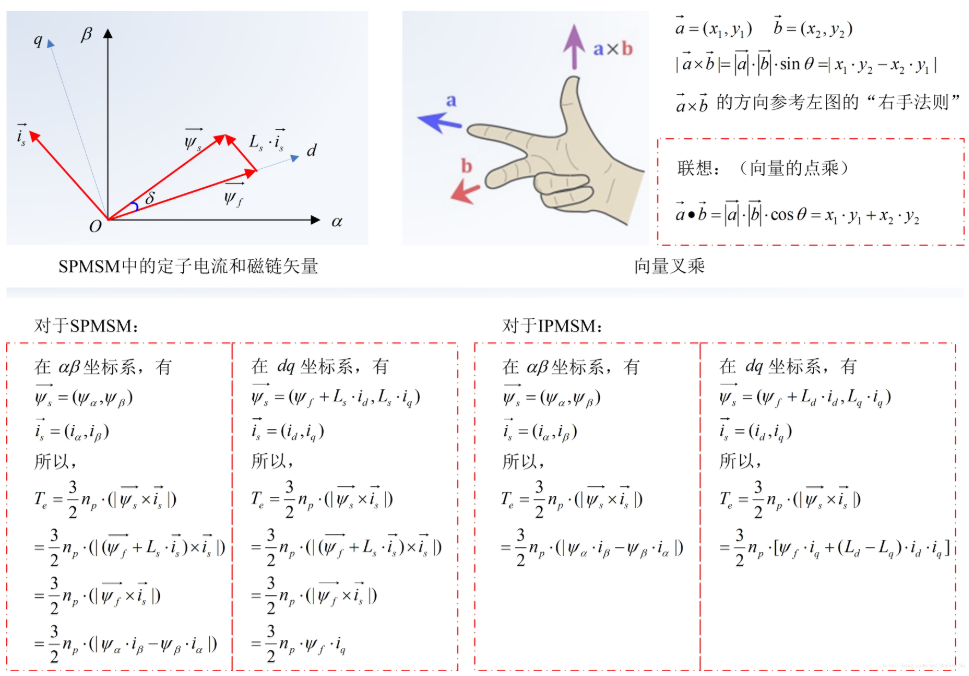
在对永磁同步电机进行直接转矩控制(Direct Torque Control, DTC)时,需要利用电机的理论公式计算出电磁转矩,作为电磁转矩实际值,然后与电磁转矩目标值进行比较,误差结果作为转矩调节器的输入。
-
聊聊什么是电磁转矩和磁阻转矩2023-07-14 6549
-
电磁转矩是什么意思?2023-03-28 4037
-
永磁直流无刷电机的转矩波动详解2020-04-12 4445
-
电磁转矩和负载转矩的关系2020-01-15 35951
-
转矩和电机电流、功率的关系2019-11-15 21618
-
步进电机静态转矩特性的测量方法2019-10-08 6356
-
矢量控制是怎样改善电机的输出转矩能力的?2016-01-29 4600
-
直流电机的电磁转矩2008-11-19 9572
全部0条评论

快来发表一下你的评论吧 !
