

dfrobot红外定位探头简介
描述



产品简介
红外定位摄像头可以用arduino、AVR等各种有I2C接口的控制器控制。最多可以追踪4个移动的红外点,并且把这些数据提供给主机。水平视角是33度,垂直视角是23度。一次返回四个点的坐标,当红外定位摄像头识别一个对象。它相应的坐标就是在第一组坐标位置,其他坐标位置为空(返回1023,1023)。如果识别多个目标则,按照检测到的先后顺序依次排列,如果其中有的运动目标移动出了视野,则相应的位置为空(返回1023,1023)。其余坐标位置保持不变。
与processing互动
红外定位摄像头可以通过arduino等各种具有I2C接口的控制器通过串口连接到processing上面,实时的显示出检测到的目标的坐标位置及数值。不要感觉这些是很不可思议的事情,强大的红外摄像头还具有更多好玩的功能,可以和processing做出各种各样的互动产品,只要你是喜欢玩的人、肯花心思思考这些都可以轻松实现。
应用实例
机器人自动寻源装置
机器人足球比赛
移动轨迹识别
技术规格
工作电压:5V、3.3V
检测距离:0~3m
接口:I2C接口
不同距离可检测的范围
距离(cm)——水平距离(cm)—— 垂直距离(cm)
10(cm)———8.5(cm)—————7.5(cm)
50(cm)———42(cm)—————32(cm)
100(cm)——— 70(cm)—————60(cm)
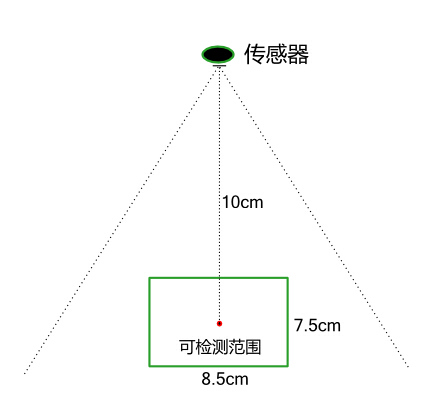
注:理解以上检测距离可以参考,上面这张图。检测的红外波长为850, 870, 890, 940, and 950 nm都能用,940nm效果最好。
引脚定义
红线:接电源5V或者3.3V
黑线:接地
绿线:SCL
黄线:SDA
-
闪电定位仪应用简介2024-11-13 721
-
红外模拟探头额温枪方案介绍2023-08-02 2338
-
DFRobot新品-Gravity:臭氧传感器简介2022-01-24 3140
-
如何使用探头定位近场EMI故障点?2021-05-08 2667
-
dfrobot音频录放模块简介2020-01-06 2390
-
dfrobot树莓派透明ABS外壳简介2019-12-31 1847
-
dfrobot阿里云loT入门套件简介2019-12-26 2340
-
dfrobot10段 LED光柱简介2019-12-25 1747
-
dfrobot数字红外接收模块简介2019-12-13 2858
-
dfrobot红外接近开关支架简介2019-12-04 2128
-
红外成像仪探头组成2018-11-19 2965
-
红外线是什么,红外线简介2010-03-10 3698
全部0条评论

快来发表一下你的评论吧 !
