

基于安森美半导体的激光雷达LiDAR技术设计方案
MEMS/传感技术
描述
激光雷达(LiDAR)是一种测距技术,近年来越来越多地用于汽车先进驾驶辅助系统(ADAS)、手势识别和3D映射等应用。尤其在汽车领域,随着传感器融合的趋势,LiDAR结合成像、超声波、毫米波雷达,互为补足,为汽车提供全方位感知,为迈向更安全的自动驾驶铺平道路。安森美半导体提供这全系列传感器方案且技术遥遥领先,在单光子雪崩二极管(SPAD)和硅光电倍增管(SiPM)传感器技术是市场领袖之一,提供完整的LiDAR方案,包括系统、传感器、输出和激光驱动器方案。
安森美半导体完整的LiDAR方案
1个LiDAR系统有6个主要的硬件功能块:传输、接收、光束转向、光学器件、输出和电源管理。典型的LiDAR系统框图如图1所示。其中,安森美半导体可提供SiPM/SPAD、激光驱动器参考设计、电源管理、放大与处理以及时序、直方图、点云生成乃至系统等。成熟的模拟SiPM 产品有C系列、J系列、R系列。系统有SiPM 阵列扫描LiDAR 演示仪(超过100 m扫描距离)、把SiPM 与图像传感器融合的FUSEONE、最新的400 x 100 SPAD 阵列Pandion。
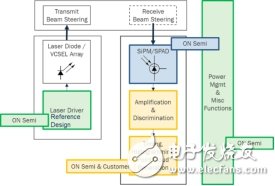
图1:典型的LiDAR系统框图
什么是SPAD、SiPM和ToF
SPAD是一种工作在盖革模式(Geiger Mode)的光电二极管,就像光子触发开关一样,处于“开”或“关”状态。SiPM是由多个独立的SPAD传感器组成,每个传感器都有自己的淬灭电阻,从而克服单个SPAD不能同时测量多个光子的不足。飞行时间(ToF)指给目标发送光脉冲然后传感器接收从目标返回的光所需的时间。通过光速和ToF,可计算出目标距离,概念很简单,但却受到现实世界诸多挑战,包括苛刻的环境如光照条件、低反射率目标及长距等。目前共有两种ToF测量技术:单激光脉冲法和多激光脉冲法。单激光脉冲法指每次测量单个脉冲返回的时间,要求高的信噪比(SNR)。多激光脉冲法指每次测量多个脉冲返回的时间,通过直方图数据来获得距离,若提高SNR可实现更远距离的探测。ToF LiDAR可用于许多应用,如机器人、无人机、工业、移动、汽车ADAS和自动驾驶及增强实境(AR)/虚拟实境(VR)等。
SiPM和SPAD正成为新兴的LiDAR探测器
SiPM和SPAD可探测距离超过200 m、5%的低反射率目标,在明亮的阳光下也能工作,分辨率极佳,且尽可能小的光圈和固态设计实现紧凑的系统集成到汽车中,并极具成本优势,正成为新兴的LiDAR探测器。
汽车LiDAR传感器要求
1. 严格的一致性
由于SiPM/SPAD工作在盖革模式下,所以很难控制产品的一致性。安森美半导体是目前全球真正有能力大批量量产SiPM产品的供应商,其提供的数百万传感器的电压和增益非常一致,易于系统校准和降低制造成本。
2. 符合车规(IATF 16949、AEC Q102、-40至1050C工作温度、符合PPAP)
安森美半导体在汽车生产方面积累了多年的专业经验,有非常完善的车规产品的质量监督和控制体系,从一开始设计就考虑了汽车认证去设计传感器和封装。
3. 在905 nm处高的光子探测率(PDE)
安森美半导体的SiPM如今具有同类最佳的PDE,超过12%,2020年将达30%。
4. 高增益
SiPM的增益是雪崩光电二极管(APD)的1万倍,是PIN二极管的100万倍,串扰
-
安森美半导体应用于物联网的成像技术和方案分享2021-05-31 2471
-
安森美半导体CMOS图像传感器方案分享2021-04-07 2584
-
安森美半导体推出dToF激光雷达方案,满足测距应用的关键需求2020-11-10 4614
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5747
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3294
-
安森美智能感知技术对三大应用领域发展有什么影响?2019-07-30 3513
-
安森美半导体探讨如何防止静电放电2019-05-30 2743
-
安森美半导体智能电表低功耗解决方案2019-05-15 3714
-
安森美半导体CMOS图像传感器方案2018-11-05 4699
-
安森美半导体宣布收购Fairchild半导体2018-10-31 5051
-
安森美半导体大力用于汽车功能电子化方案的扩展汽车认证的器件2018-10-25 2269
-
安森美半导体收购Fairchild半导体以来的首次展示2018-10-23 2751
-
安森美半导体展示移动通信与联接技术方案2018-10-11 2717
全部0条评论

快来发表一下你的评论吧 !
