

步进电机的相关说明
电子说
描述
什么是步进电机?
步进电机是离散运动的直流电机。它们具有多个线圈,这些线圈以称为“相”的组进行组织。通过依次给每个相通电,电动机将一次旋转一个步。
通过计算机控制的步进,您可以实现非常精确的定位和/或速度控制。因此,步进电机是许多精密运动控制应用的首选电机。
步进电机有许多不同的尺寸,样式和电气特性。本指南详细介绍了您需要了解适合该工作的电动机的内容。
四相单极电动机。 来自Wikimedia Commons的动画
步进电机有哪些优点?
定位 –由于步进器以精确的可重复步长移动,因此它们在要求精确定位的应用(例如3D打印机,CNC,Camera平台和X)中表现出色,Y绘图仪。某些磁盘驱动器还使用步进电机来定位读/写头。
速度控制 –精确的运动增量还可以实现出色的转速控制,从而实现过程自动化
低速扭矩-普通的直流电动机在低速时扭矩不大。步进电机在低速时具有最大扭矩,因此对于需要高精度的低速应用是一个不错的选择。
它们的局限性是什么?
低效率 –与直流电动机不同,步进电动机的电流消耗与负载无关。当他们根本不工作时,请汲取最新信息。因此,它们倾向于运转。
有限的高速转矩-通常,步进电动机在高速下的转矩要比在低速下小。一些步进器经过了优化,以实现更好的高速性能,但需要将其与合适的驱动器配对才能实现该性能。
无反馈 –与伺服电机不同,大多数步进机都没有积分反馈的位置。尽管在“开环”运行中可以达到很高的精度。为了安全和/或建立参考位置,通常需要限位开关或“家用”探测器。
步进电机的类型
步进电机的种类繁多,其中一些需要非常专业的驱动程序。出于我们的目的,我们将重点介绍可以用普通电机驱动的步进电机。可用的驱动器。它们是:永磁或混合式步进电机,两相双极或四相单极。
电动机尺寸,首先要考虑的事情是电动机必须完成的工作。如您所料,大型电机能够提供更大的功率。步进电机的尺寸范围从小于花生到大型NEMA 57怪物。
大多数电动机具有额定扭矩。这是确定电动机是否具有满足您所需功能的强度时需要考虑的内容。
NEMA 17是3D打印机和小型CNC铣床中常用的尺寸。小型电机可用于许多机器人和动画应用。较大的NEMA机架在CNC机械和工业应用中很常见。
NEMA编号定义了用于安装电机的标准面板尺寸。它们没有定义电动机的其他特性。两种不同的NEMA 17电动机可能具有完全不同的电气或机械规格,并且不一定可以互换。
步数接下来要考虑的是您所需的定位分辨率。每转的步数范围为4到400。通常可用的步数为24、48和200。分辨率通常表示为每步度数。 1.8 °电动机与200步/转电动机相同。
要获得高分辨率,就要权衡速度和转矩。高步数电机以比类似尺寸更低的RPM达到最高输出。与以类似速度运行的类似尺寸低步数电动机相比,旋转这些电动机所需的更高步数导致较低的扭矩。
齿轮实现高定位分辨率的另一种方法是齿轮传动。将32:1齿轮系应用于8步/转电动机的输出将产生512步电动机。
齿轮系也会增加电动机的扭矩。一些微小的齿轮式步进器能够产生惊人的扭矩。但是,当然要权衡速度。齿轮步进电机通常仅限于低RPM应用。
轴样式的另一件事是电机如何将与驱动器系统的其余部分连接。电机有多种轴类型:
圆轴或“ D”轴:这些轴具有各种标准直径,并且有许多皮带轮,齿轮和专门设计的轴连接器。 “ D”轴的一侧扁平,有助于防止打滑。当涉及到高扭矩时,这些是理想的。
齿轮轴:有些轴的齿轮齿正好铣入其中。这些通常设计为与模块化齿轮系配合。
导螺杆轴:带导螺杆的电机用于构建线性致动器。这些的微型版本可以在许多磁盘驱动器中找到磁头定位器。
接线步进电机接线有很多变化。就我们的目的而言,我们将重点介绍可以由常用驱动器驱动的步进器。这些是连接为2相双极或4相单极的永磁体或混合式步进电机。
线圈和相位步进电机可以具有任意数量的线圈。但是,这些连接成组称为“阶段”。相中的所有线圈都一起通电。
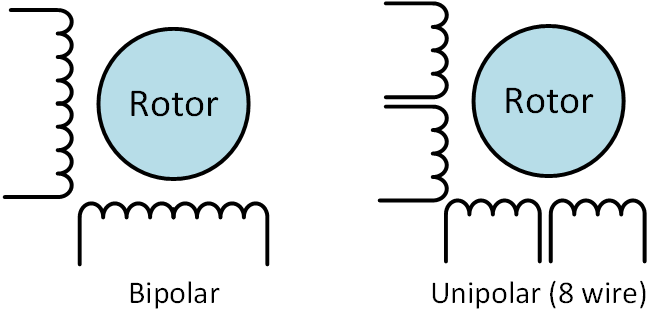
单极与双极 单极驱动器,始终以相同的方式激励相位。一个线索,即“常见”线索,将永远是负面的。另一个线索将永远是积极的。单极驱动器可以用简单的晶体管电路实现。缺点是可用扭矩较小,因为一次只能给一半线圈通电。
双极驱动器使用H桥电路实际上使流过各相的电流反向。通过以交替的极性为相供电,可以使所有线圈运转以使电动机旋转。两相双极电动机具有两组线圈。 4相单极电动机有4个。2相双极电动机将有4根线-每相2条。有些电动机带有灵活的接线,可让您以双极性或单极性运行电动机。
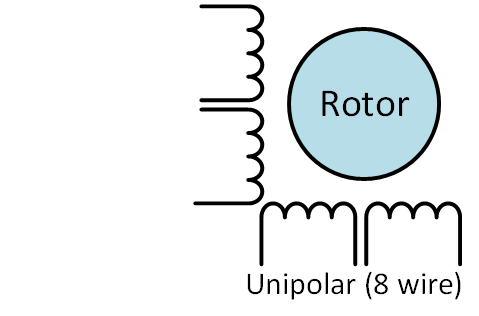
8线电机 8线单极是所有功能中最通用的电机。它可以通过几种方式进行驱动:
4相单极-所有公共线都连接在一起-就像5线电机一样。
2相串联双极-相串联连接,就像6线制电动机。
2相并联双极性-相并联连接。这样可产生一半的电阻和电感-但需要两倍的电流来驱动。这种接线的优点是更高的扭矩和最高转速。
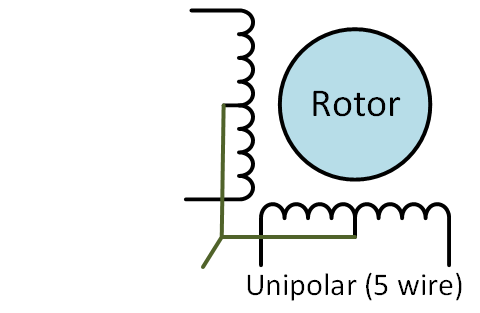
5-Wire电动机
这种样式在较小的单极电动机中很常见。所有常见的线圈线在内部都绑在一起,并作为第五根线引出。该电动机只能作为单极电动机来驱动。
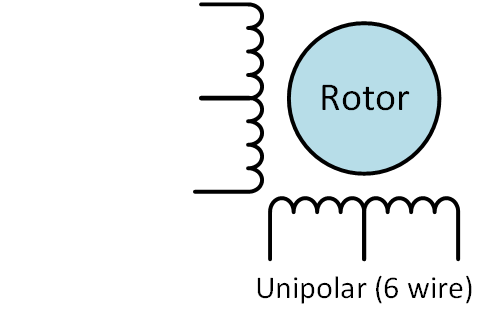
6-Wire电动机。该电动机仅连接2对配对的公共线。可以将这两条线连接起来以创建5线单极电机。
或者您也可以忽略它们,将其视为双极电机!
驾驶踏步车
按时间步入,按时间步入
快点,物料,按时间步入
适时
适时,适时
适时,适时
从不需要理由,从没有韵律
我们踏入时空,我们踏入时空
“踏入时空”
Robert B. Sherman and Richard谢尔曼(M.Sherman)
驱动步进电动机比驱动常规有刷直流电动机要复杂一些。步进电动机需要一个步进控制器来及时激励各相,以使电动机旋转。
简单的单极性驱动程序最简单的驱动器类型可以由少数晶体管构成。只需按顺序打开和关闭这些电源即可为各相通电并步进电动机。单极驱动器的制造成本相对较低,但仅适用于单极电机。在Arduino站点上有一个很棒的教程。
单极步进驱动器教程
简单的双H桥驱动器驱动双极型电动机需要2个完整的H桥,以便可以将电流反向转换为相位。从头开始构建H桥可能很棘手。但是,有很多H桥芯片可以简化任务。
L293D是最受欢迎和最经济的芯片之一。这些可以在大多数第一代电动机防护罩的心脏中找到,包括广受欢迎的V1 Adafruit电动机防护罩。
关于在Adafruit学习系统中使用裸露的L293D和Arduino的精彩教程:
第16课-步进电机
Adafruit Motor Shield V2 与基于L293D的基本控制器相比,Adafruit Motor Shield V2有了很大的进步。 V2屏蔽使用两个TB6612 MOSFET驱动器。与L293D相比,TB6612具有两倍的电流容量和更低的压降,从而可以更高效地驱动步进器。
总共有2个驱动器芯片和4个完整的H桥,每个屏蔽层最多可以驱动两个步进电机。驱动器芯片通过专用的PWM驱动器芯片与I2C接口连接。这释放了许多GPIO引脚供其他用途,并使屏蔽层也可堆叠。您最多可以堆叠32个驱动器,仅用2个IO引脚即可控制64个电机!
该驱动程序的详细信息可以在学习系统中找到。
Adafruit Motor Shield V2指南
高级CNC控制器 gShield和TinyG CNC控制器板使您更接近工业级步进器性能。这些板具有恒定电流“斩波器”驱动器,可对其进行调整以从电动机提供最大扭矩和速度。
TinyG CNC具有板载G代码解释器和4个电机输出,这使它成为中小型4轴CNC机床的完整嵌入式解决方案。
如您所料,这些高级,高性能,性能板更复杂,建议有经验的用户使用。
这些板及其操作的详细信息可以在TinyG Wiki和Synthetos论坛中找到。
Synthetos论坛
Tiny G Wiki
将驱动程序匹配到步进器
现在,我们来讨论最重要的部分:确保您的电动机和驱动器兼容。
电动机和驱动器不匹配会导致令人失望的性能。或更糟糕的是:电动机和/或控制器损坏。
如果选择不当,您可能会遇到这个人:
了解驱动器规格,驱动器规格中的两个最重要的参数是:
电压-驱动器可以提供给电动机的最大电压。
连续电流-驱动器可以提供给电动机的最大电流。
“峰值”电流额定值不适用于步进电机。始终遵循“连续”当前评分。
了解电动机规格,您还需要了解电动机的电气规格。有2个关键参数:
每相安培-这是电机绕组在不过热的情况下可以处理的最大电流。
每相电阻-这是每相的电阻。
通常会给出电压的额定值。通常是根据以上两个方法计算得出的-但并非总是如此。最好使用欧姆定律根据上述参数来计算自己。
服从法律! 步进电动机的相位是电感,因此它们将抵抗电流的快速变化。但是,在每个步骤结束时或不移动时,它们的行为就像纯电阻性负载,并且会按照欧姆定律起作用。
当步进电机消耗最大电流时,仍然保持静止。因此,欧姆定律允许我们使用电动机规格来计算驱动器的电流要求。
电压=电流x电阻
或
电流=电压/电阻
》的公式应严格应用于所有“恒定电压”步进控制器。这包括Adafruit的V1和V2电动机屏蔽罩,以及几乎所有其他基于L293D的控制器。
但有些电动机的线圈电阻非常低。严格遵循这些公式,驱动电压将小于5v,性能将不佳。这种类型的电动机对于恒压驱动器不是很好的匹配。这些步进器需要更专业的控制器。
超越法律?
不可能欺骗欧姆定律。如果尝试,则必须回答Blue Smoke Monster。但是,这里还有其他一些法律在起作用。 Lenz,Faraday和Ohm律师事务所的专业知识可以帮助您提高电动机的性能。
步进线圈通电后会产生磁场。根据法拉第定律,不断变化的磁场在线圈中感应出电流。并且根据伦兹定律,该电流将与创建该场的电流相反。此反向电流称为“反电动势”或“ 反电动势”。
此反电动势会增加线圈的“ 阻抗”或有效电阻。因此,欧姆定律仍然适用-但适用于此阻抗,而不适用于简单的相电阻。此阻抗会限制每个步骤开始时流经线圈的电流。
Chopper Drives A 斩波器或“ 恒定电流”驱动器通过以更高的电压驱动电机来补偿反电动势。使用斩波器驱动器以几倍于额定电压的速度驱动步进电动机是很正常的。
为了在较高的电压下确保事物的安全,斩波器驱动器还监视传递到电动机的电流,并在电动机斩波之前对其进行“斩波”。超过预设水平。通过以更高的电压启动,斩波器驱动器能够在步骤开始时向线圈传递更多的电流,从而增加了可用转矩。除了在较低的速度下增加扭矩外,这还允许更高的最高速度。
选择斩波驱动器并将其配置为特定电动机需要对电动机和控制器都有很好的了解。
常见问题解答
此电机可以与我的防护罩一起工作吗?
您需要了解电机规格和控制器规格。获得这些信息后,请检查“ 将驱动程序匹配到步进器”页面以查看它们是否兼容。
这是NEMA 17,
NEMA帧大小标准仅定义了安装面板的尺寸。要弄清楚它是否兼容,您需要了解电动机的电气规格。
如果没有电机怎么办
?请参阅Jason,了解对步进电线引出线进行反向工程的方法。这将告诉您相电阻。对于相电流,您可以基于类似设计和相似相电阻的电动机进行估算。
有疑问时,最好还是在安全方面犯错误,并使用较低的电流!
我的项目需要什么尺寸的电机?
大多数电动机都有扭矩规格-通常以英寸/盎司或牛顿/厘米为单位。 1英寸/盎司表示电动机可以在距轴中心1英寸处施加1盎司的力。例如,它可以使用2英寸直径的滑轮支撑一盎司。
在计算项目所需的扭矩时,请确保留有加速和克服摩擦所需的额外扭矩。
如果您的项目需要很大的扭矩而不是太大的速度,请考虑使用齿轮式步进器。
怎么办我将电动机连接到电动机护罩了吗?
从Adafruit购买的电动机有接线产品说明中列出的说明
对于其他电动机,请检查电动机的规格表(如果有)
如果没有规格表,请在反向工程中检查杰森(Jason)的步进电线引出线。
此p
首先要确保其电压不超过 * 通常,您可以在较低的电压下运行电动机,尽管转矩会降低。
下一步,检查电流额定值。大多数步进模式一次可为两相通电,因此额定电流至少应为电动机每相电流的两倍。
* 这适用于恒压驱动器。对于斩波驱动器控制器,请查看控制器说明。
责任编辑:wv
- 相关推荐
- 热点推荐
- 步进电机
-
步进电机的相关知识:相、线、极性和步进方式2023-03-24 1255
-
CVD 步进电机驱动器说明2023-03-13 5068
-
步进电机驱动相关的知识2022-10-19 3111
-
请问CH57X有没有开漏输出的相关说明?2022-10-09 794
-
【BLE蓝牙】求助BK3432 IR红外寄存器和TIMER定时器相关说明及对应引脚2021-09-22 4254
-
一文带你了解步进电机的相关知识2021-07-08 2347
-
步进电机模块使用说明2021-07-07 1472
-
步进电机之步进电机驱动器使用相关说明2021-06-29 3940
-
Keil、 IAR编译存储相关说明及拓展2020-03-20 4279
-
步进电机驱动THB6560AHQ使用说明2016-07-13 1645
-
如何使用相关说明2012-05-29 1724
-
直线步进电机控制系统的设计说明2009-04-02 677
全部0条评论

快来发表一下你的评论吧 !
