

勃肯特升级了3D视觉技术 完善了并联机器人的应用
机器人
描述
随着传统制造业的转型升级以及“中国制造2025”战略的推进,工业机器人的应用越来越广泛。近几年,大量的工业机器人被应用于装配制造、分拣包装、拆垛码垛等环节,使企业生产过程自动化水平不断提高,同时企业的生产模式由传统的以人力为主导转变为机器人为主导,这种模式的改变大大提高了产品的生产效率,降低了生产成本,同时减小了某些恶劣的生产环境对工人身体上造成的危害。在机器人作业过程中,如何对随意堆放的零部件或者货物进行准确的抓取,成为目前行业的应用和研究热点问题,勃肯特机器人技术团队在前期已有的技术基础上,完善升级了3D视觉技术,配合勃肯特串并混联六轴机器人,开发了基于3D视觉的无序分拣技术。
不同于传统2D视觉,3D表面成像/重构/测量技术,可用于测量物体表面上点的(x,y,z)坐标,测量结果可表示为深度图{ }。除了测量三维坐标,3D表面成像系统也可输出物体表面空间点的其他光学特征值,如反射率、颜色等。这时的点云测量结果可一般表示为{
}。除了测量三维坐标,3D表面成像系统也可输出物体表面空间点的其他光学特征值,如反射率、颜色等。这时的点云测量结果可一般表示为{ } ,其中,为一向量,代表第i个点的光学特征值。如常见的RGB-D(红绿蓝-深度)测量数据可表示为{
} ,其中,为一向量,代表第i个点的光学特征值。如常见的RGB-D(红绿蓝-深度)测量数据可表示为{ }。
}。
目前,常见的3D表面成像技术有:双目立体视觉(binocular stereo vision),多目立体视觉(multi-view stereo vision),线结构光三角测量(laser triangulation with sheet of light),编码结构光三角测量(encoded structured light),飞行时间深度测量(time of flight),聚焦深度测量(depth from focus),光度立体视(photometric stereo vision)。本方案采用编码结构光三角测量原理的3D结构光相机。其工作原理为:编码结构光激光器向目标物体投射经过特殊设计的编码图案,基于不同的图案编码方法,相机可能需要拍摄一幅或多幅被激光器照射的目标物体表面图像,通过对比图像上经过物体表面调制的编码光图案与未调制的编码光图案可以测量获得目标表面的3D形貌。
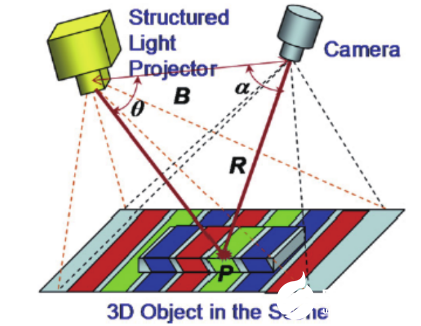
图1 结构光成像原理示意图
在视野范围满足相机的检测要求时,调节相机相关参数可获得相机拍摄的灰度图和对应的深度图。
图2相机获取的灰度图
图3相机获取的深度图
在获取到点云数据后,经过点云滤波、点云分割等点云预处理步骤后,采用FPFH特征描述子对点云的特征进行提取。快速点特征直方图描述子(FPFH),它是从PFH特征演变而来的具有计算复杂度较低,运算速度较快等特点。
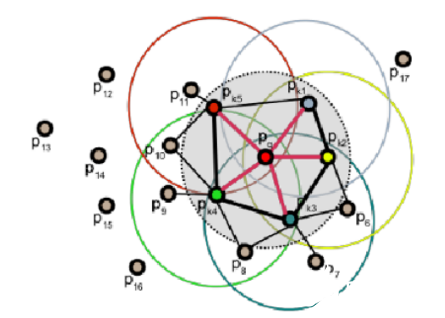
图4点P的FPFH特征领域
在对目标点云进行特征提取后,选用点云数据全局特征描述子中的 OUR-CVFH特征对分割后的点云块进行分类,再用模板匹配的方法将模板与分割出来的子目标的点云进行匹配,完成对不同种类物体点云的位姿估计,最终通过与机器人的标定,完成机器人在3D视觉下的无序分拣任务。
图5不同种类点云分割效果图
- 相关推荐
- 热点推荐
- 并联机器人
-
基于3D视觉技术的机器人系统2013-05-14 5093
-
3D图形控件设置并联机器人各两件间的对象关系2020-03-28 1353
-
勃肯特,直驱并联机器人 颠覆减速机时代2018-07-17 3964
-
勃肯特并联机器人在技术上有哪些优势?2018-07-24 5074
-
勃肯特直驱并联机器人计划推向市场,看看它有哪些特点?2018-07-28 4866
-
拖动示教测试在并联机器人应用领域实现零突破2018-12-07 1860
-
勃肯特最新发布两款机器人产品2019-06-14 3341
-
勃肯特推出并联机器人 进入了结构全新升级阶断2019-11-14 1390
-
勃肯特推出并联机器人Wraith-1200 深耕并联行业工业软件生态体系2019-12-13 1399
-
Stewart并联机器人的独特优势和应用范围2020-06-21 5902
-
2020年并联机器人产业发展蓝皮书发布2020-09-27 3229
-
使用并联机器人和机器视觉技术实现自动分拣机器视觉软件系统的设计2020-11-16 1627
-
并联机器人控制2021-04-20 1128
-
3D 机器视觉正在改变机器人技术2022-12-29 1449
-
勃肯特机器人新品首发!混合运动型机器人性能突破引爆关注2024-09-25 1386
全部0条评论

快来发表一下你的评论吧 !
