

电机正反转互锁控制的软硬件实现
控制/MCU
1933人已加入
描述
用控制正向运行的接触器断开作为反向运行的接触器吸合的一个条件,或者用电机反向运行的接触器断开作为正向运行的接触器吸合的一个条件就是互锁控制。
电动机正反转互锁控制两种方法是:一,电气互锁,二,机械互锁。
电气互锁是将正反转接触器的常闭触点串接进另一个接触器的控制线圈回路来实现,机械互锁是通过外部机械连杆保证两个接触器铁芯不会同时吸合。
电机正反转互锁控制的软硬件实现
三相电机通过简单换相就可以实现旋转方向的改变。因此在实际应用中大多通过两个接触器实现正反转控制。需要注意的是两个接触器不能同时导通!会引起短路故障。因此需要通过必要的手段进行保护。根据现在大多系统实现plc控制,从软硬件两方面对保护的实施进行说明。
1、 硬件防护
这是传统且常见的防护措施。电气原理图如下所示。
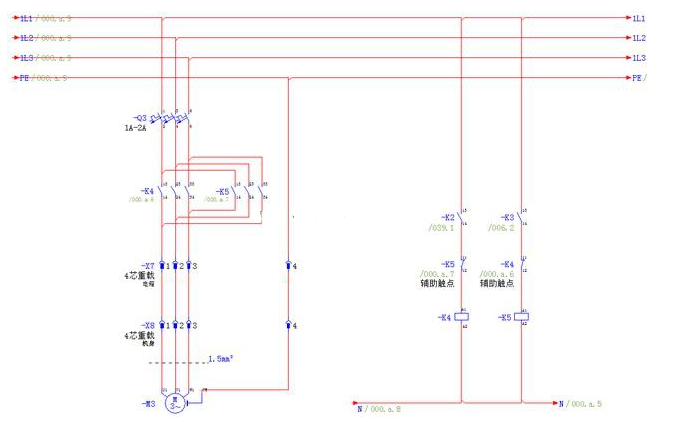
器件K2和K3为24V继电器,K4和K5为交流接触器。K2和K3由PLC输出点控制吸合动作。K4和K5的常闭辅助触点分别串联接入对方的电路。
电机正转时K2吸合,K5辅助触点常闭导通,K4线圈得电,K4触点吸合,电机开始正转。同时K4常闭辅助触点断开,反转回路无法导通。实现保护的目的。反转也是同理。
2、 软件防护
软件防护主要是在程序上实现正反转互锁。梯形图编程如下图所示。
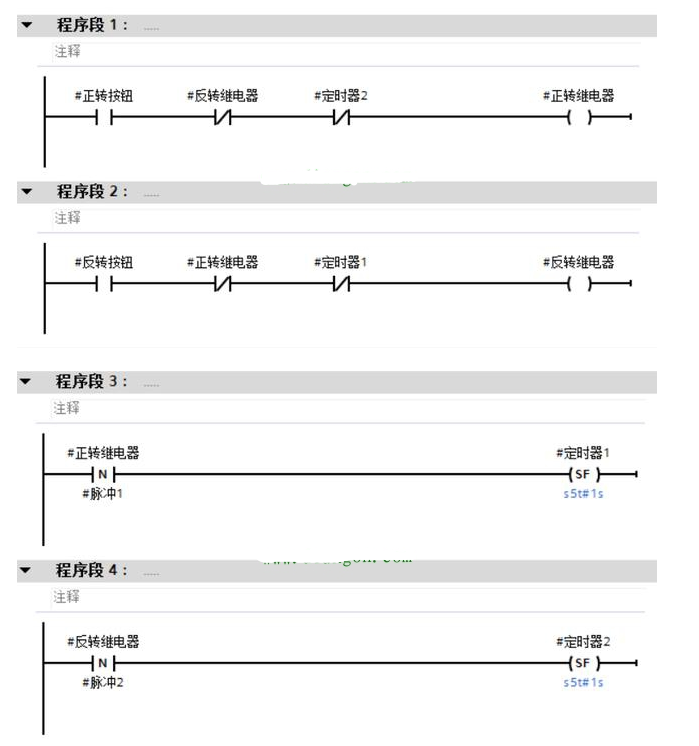
确保在某一方向运行时,另一方向回路不会导通。这里使用定时器主要为了换向延时,电机如果是自由停车需要一定的时间才能静止,然后再反向。具体可以根据实际应用情况更改不同的时间。如果是带有刹车制动的电机,那么每次启动前要释放刹车,要确保刹车释放后才能启动电机,此处也可以使用延时,不过是启动延时。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
三相电机为什么有正反转2023-03-03 7046
-
怎么实现电机联锁正反转控制仿真?2021-10-18 1848
-
双重互锁得正反转控制线路和自动往复控制线路2010-03-31 14599
-
带互锁的电机正反转控制系统实训论文2017-12-19 1394
-
电机正反转原理2019-01-07 125264
-
双重互锁正反转控制电路分析2019-10-18 45107
-
电机正反转互锁控制应用程序源码下载2021-04-06 1933
-
电机正反转 如何确定电机正反转2021-07-15 75782
-
三相电机正反转控制电路实物接线图2022-11-03 80922
-
三相交流电机正反转固体控制器的设计2023-03-27 1142
-
互锁正反转电路的两种实现方式2023-04-27 17385
-
互锁正反转电路运行原理讲解2023-11-08 4131
-
步进电机的正反转实现方法2024-06-14 8335
-
简单介绍plc如何控制电机正反转2024-07-29 3254
-
无刷电机正反转由什么控制2024-09-03 2840
全部0条评论

快来发表一下你的评论吧 !
