

系统校正实验
matlab实验
11人已加入
描述
系统校正实验
一、实验目的
① 理解系统校正的作用;
② 掌握PID控制器的设计方法;
二、实验要求
①仔细检查系统硬件连接,调整控制参数直至获得较好的控制效果;
②认真完成实验并提交实验报告,分析理论结果与实际结果的差异。
三、实验内容
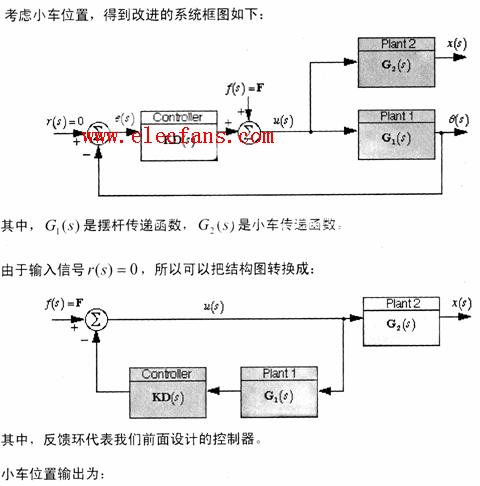
针对直线一级倒立摆,设计PID控制器,寻找合适的PID控制参数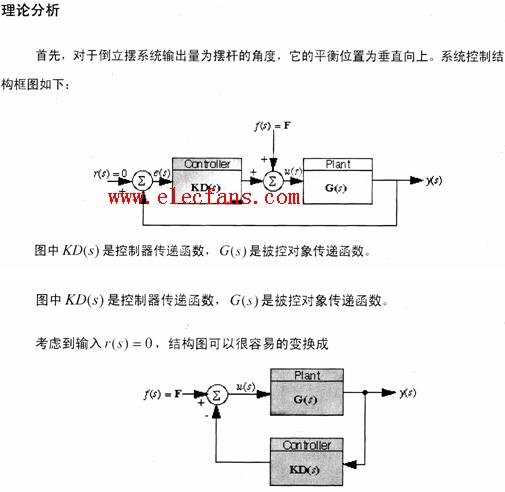
1. 根据建模结果仔细计算并寻找合适的理论PID控制参数
2. 进行仿真实验,通过调节PID参数仔细观察思考控制器参数对系统瞬态响应和稳态响应的影响,找出几组合适的控制器参数作为实际控制的参数。
3. 通过调整参数可以控制摆杆坚直向上,此时可能需要用手轻轻扶一下摆杆,以免小车“撞墙”。
4. 如果控制效果不理想,调整控制器参数,直至获得较好的控制效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 校正
-
高压放大器在高功率固体板条激光器光束实验中的应用2024-09-20 1339
-
求一种基于复杂可编程逻辑器件的硬件校正实现方案2021-04-28 1935
-
利用纹理映射技术实现鱼眼镜头校正研究2017-09-07 920
-
线性离散系统的分析与校正2016-12-30 564
-
基于图像透视畸变校正的调炮速度测量系统2016-05-20 572
-
闭环系统的虚拟参考反馈校正控制设计2016-04-25 826
-
基于模糊控制的磁引导AGV系统路径校正的应用研究2016-04-13 924
-
基于Labview的的远程温度校正系统2016-01-12 3415
-
电液伺服系统校正禁忌2011-12-16 1787
-
单级功率因数校正电路的直流母线电压分析和实验研究2009-07-14 1601
-
PID的参数整定及参数变化对系统的影响综合实验2009-05-17 29789
-
自动化控制系统的校正2009-01-08 919
-
设计二阶系统动态校正环节2008-10-16 5148
全部0条评论

快来发表一下你的评论吧 !
