

伺服电机是如何实现精准定位?如何理解它的闭环特性?
伺服与控制
描述
伺服电机是一种可以将电信号转换为位移,角度变化的高精度执行机构。电机的位移量是靠脉冲信号控制的,每给伺服电机一个脉冲信号,伺服电机都输出一定的位移。你需要伺服电机定量的位移,只需要给定相应数量的脉冲信号即可。
伺服电机是靠脉冲实现定位的,严格来讲这个叫位置环控制,就是上位机给多少脉冲伺服电机,伺服就走多少角度,比如一转对应2500个脉冲,这是常见的。
伺服电机定义
伺服电机主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。伺服电机在要求精密控制的工业自动化设备中得到了广泛的应用,他的闭环控制功能,是步进电机无法比拟的。在一些场合,由于步进电机没有反馈,因此当步进电机卡死或打滑会出现丢步的情况,从而大大影响设备使用精度,因此步进电机一般用于纯粹的转动过程,或者用于对精度要求不高的使用场合。
伺服电机是如何实现精准定位?如何理解它的闭环特性?今天我们就来说说。
首选我们看下交流伺服系列的组成。由伺服驱动器和伺服电机组成。这里我们主要讲述伺服驱动的工作原理,电机只是一个执行机构。驱动器的结构简图如下,和变频器的主电路类似,电源经过整流,逆变,实现从AC-DC-AC的转换。
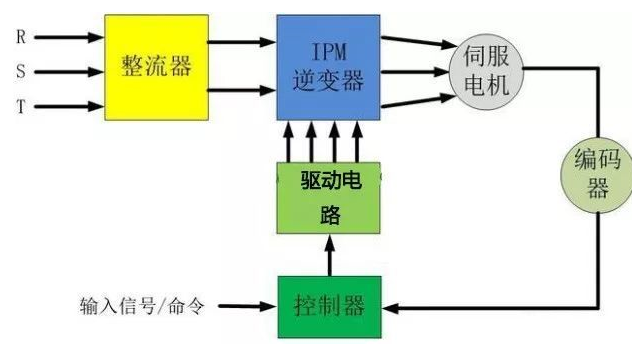
伺服驱动器结构简图
输入信号/命令可以是位置、速度、扭矩等控制信号,对应伺服电机的三种控制模式,每种控制模式都对应着环的控制,扭矩控制是电流闭环控制,速度模式是速度闭环控制,位置模式则是三闭环控制模式(扭矩、速度、位置)。下面我们对位置模式的三闭环进行分析:
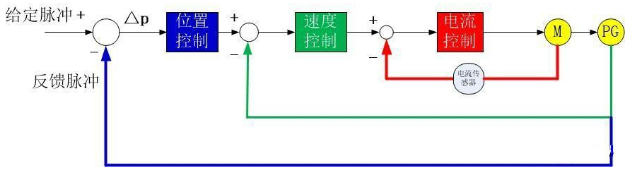
位置模式的三闭环控制
上图中M表示伺服电机,PG代表编码器,最外面的蓝色的代表位置环,因为我们最终控制的是位置(定位),内环分别是速度环和电流环(扭矩环),位置模式下速度环和电流环作为保护环防止失速控制和过载以确保电机恒速运转和电机电流恒定。我们重点看下位置环是如何确保电机能够准确旋转给定的角度。
假如我们给定脉冲为1个,此时反馈脉冲为,脉冲偏差△p=1,输入到控制器中,这时候驱动电路控制IPM逆变器产生SPWM波驱动伺服电机旋转,注意这个SPWM波和我们发脉冲的方波是不一样的,时电机带动编码器旋转发出反馈脉冲,这个时候△p=0,电机停止输出,1个脉冲定位完成。整个从发出脉冲到接受反馈脉冲的过程就是一个闭环过程,从而确保电机能够准确定位,脉冲的数量决定定位的距离,脉冲的频率决定电机的转速。
PLC控制伺服电机
服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},简要介绍位置模式的控制方法。
一、按照伺服电机驱动器说明书上的‘位置控制模式控制信号接线图’连接导线
3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。 7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
二、设置伺服电机驱动器的参数
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求。
3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
4、Pr41,Pr42----简单地说就是控制伺服电机运转方向。Pr41设为0时,Pr42设为3,则5(SIGN1),6(SIGN2)导通时为正方向(CCW),反之为反方向(CW)。Pr41设为1时,Pr42设为3,则5(SIGN1),6(SIGN2)断开时为正方向(CCW),反之为反方向(CW)。(正、反方向是相对的,看您如何定义了,正确的说法应该为CCW,CW)。
5、Pr46,Pr4A,Pr4B----电子齿轮比设定。此为重要参数,其作用就是控制电机的运转速度与控制器发送一个脉冲时电机的行走长度。
其公式为:
伺服电机每转一圈所需的脉冲数=编码器分辨率× Pr4B/(Pr46 × 2^Pr4A)
伺服电机所配编码器如果为:2500p/r 5线制增量式编码器,则编码器分辨率为10000p/r
如您连接伺服电机轴的丝杆间距为20mm,您要做到控制器发送一个脉冲伺服电机行走长度为一个丝(0.01mm)。计算得知:伺服电机转一圈需要2000个脉冲。(每转一圈所需脉冲确定了,脉冲频率与伺服电机的速度的关系也就确定了)
三个参数可以设定为:Pr4A=0,Pr46=10000,Pr4B=2000,约分一下则为:Pr4A=0,Pr46=100,Pr4B=20。
从上面的叙述可知:设定Pr46,Pr4A,Pr4B这三个参数是根据我们控制器所能发送的最大脉冲频率与工艺所要求的精度。在控制器的最大发送脉冲频率确定后,工艺精度要求越高,则伺服电机能达到的最大速度越低。
做好上面的工作,编制好PLC程序,我们就可以控制伺服运转了。
-
基于“互联网+”与北斗的精准定位智慧停车系统2017-08-08 4298
-
手机百度地图室内精准定位问题2018-02-02 5341
-
车载定位器室内精准定位方案2018-02-26 7414
-
如何精准定位电缆故障2019-03-28 2545
-
如何增强蓝牙接收信号强度,实现精准定位?2019-09-18 22750
-
UWB精准定位:让电厂更安全2020-07-30 1622
-
如何实现伺服电机的精准定位2019-03-01 18243
-
我国5G北斗精准定位技术已成熟2019-04-08 2837
-
UWB技术是如何做到室内精准定位的?2022-10-18 1515
-
伺服电机是如何实现精准定位?如何理解它的闭环特性?2023-05-09 3034
-
伺服电机的精确定位方法及分类简介 | 步进电机驱动器细分评定2024-02-20 2223
-
伺服电机的精确定位方法2024-01-20 2285
-
室内精准定位是什么?室内精准定位的方式有哪些?2024-07-09 1628
-
室内精准定位的应用范围?室内精准定位的方式有哪些2024-07-11 1264
-
如何实现室内精准定位?分享室内精准定位技术及方法2024-09-24 3018
全部0条评论

快来发表一下你的评论吧 !
