

自动驾驶汽车的毫米波和激光雷达有什么区别
电子说
描述
对于自动驾驶,简单来说就是对大量交通数据进行运算,最终得到最优的行车路线和速度。但是最关键的技术难点却在于获取数据。所以雷达变成了自动驾驶不可或缺的硬件。自动驾驶汽车通过雷达将复杂的交通数据全部捕获。而自动驾驶汽车上常见的雷达有两种,分别是毫米波雷达和激光雷达。今天小编就跟大家聊一聊两种雷达的区别。
雷达的基本概念
雷达是一个熟悉又陌生的词,是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
什么是毫米波雷达
首先我们要明白啥是毫米波,毫米波实质上就是电磁波。毫米波的频段比较特殊,其频率高于无线电,低于可见光和红外线,频率大致范围是10GHz—200GHz。这是一个非常适合车载领域的频段。目前,比较常见的车载领域的毫米波雷达频段有三类。
1、24GHz,这个频段目前大量应用于汽车的盲点监测、变道辅助。雷达安装在车辆的后保险杠内,用于监测车辆后方两侧的车道是否有车、可否进行变道。这个频段也有其缺点,首先是频率比较低,另外就是带宽比较窄,只有250MHz。
2、77GHz,这个频段的频率比较高,国际上允许的带宽高达800MHz。据介绍,这个频段的雷达性能要好于24GHz的雷达,所以主要用来装配在车辆的前保险杠上,探测与前车的距离以及前车的速度,实现的主要是紧急制动、自动跟车等主动安全领域的功能。
3、79GHz,这个频段最大的特点就是其带宽非常宽,要比77GHz的高出3倍以上,这也使其具备非常高的分辨率,可以达到125px。
原理:振荡器会产生一个频率随时间逐渐增加的信号,这个信号遇到障碍物之后,会反弹回来,其时延是2倍距离/光速。返回来的波形和发出的波形之间有个频率差,这个频率差和时延是呈线性关系的:物体越远,返回的波收到的时间就越晚,那么它跟入射波的频率差值就越大。将这两个频率做一个减法,就可以得到二者频率的差频,通过判断差拍频率的高低就可以判断障碍物的距离。
毫米波雷达特点
精准度高,抗干扰能力强 探测距离远 ,呈广角探测 ,探测范围广,作用时速可达到120码以上,全天候工作,雨雪雾霾沙尘暴等恶劣天气,均能开启正常使用。穿透能力强,安装也可以完全隐蔽,不影响车辆整体外观。因此毫米波雷达技术更适用于汽车防撞领域。
什么是激光雷达
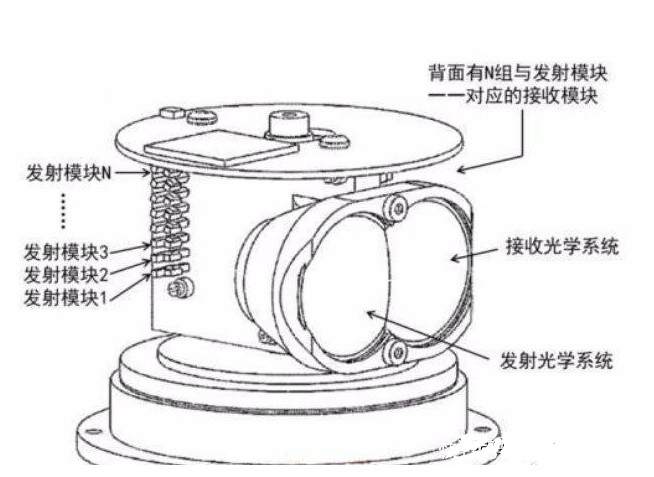
激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测激光信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。
激光雷达最基本的工作原理与无线电雷达没有区别,即由雷达发射系统发送一个信号,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。至于目标的径向速度,可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度,这是、也是直接探测型雷达的基本工作原理。
激光雷达特点
精度高,稳定性强。但是激光雷达通过发射光束进行探测因此探测范围窄,光束受遮挡后就无法正常使用,因此在雨雪雾霾天,沙尘暴等恶劣天气不能开启,受环境影响大。并且没有穿透能力,探头必须完全外露才能达到探测效果,对于安装车辆来说影响车辆外形美观。因此,激光雷达防撞器在使用过程中局限性较大。
毫米波雷达和激光雷达的区别
毫米波雷达从上世纪起就已在高档汽车中使用,技术相对成熟。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点,且其引导头具有体积小、质量轻和空间分辨率高的特点。此外,毫米波导引头穿透雾、烟、灰尘的能力强,相比于激光雷达是一大优势。毫米波雷达的缺点也十分直观,探测距离受到频段损耗的直接制约,想要探测的远,就必须使用高频段雷达。而且也无法感知行人,并且对周边所有障碍物无法进行精准的建模。
而激光雷达主要是通过发射激光束来探测周遭环境,车载激光雷达普遍采用多个激光发射器和接收器,建立三维点云图,从而达到实时环境感知的目的。技术上来讲,目前传统激光雷达技术已经很成熟,而固态激光雷达和混合固态激光雷达尚处于起步阶段,因此各企业当前在自动驾驶汽车使用的激光雷达,多以机械式激光雷达为主。激光雷达的优势在于其探测范围更广,探测精度更高。但是,激光雷达的缺点也很明显:在雨雪雾等极端天气下性能较差;采集的数据量过大;十分昂贵。
写在最后
经过详细的解读,大家不难发现两种雷达对于自动驾驶都起着重大的作用,虽然自身都有着不同的优缺点,单独工作也很难完成自动驾驶任务。但是两者结合却很好的弥补了对方的缺点。相信在不久的将来两种雷达会同时出现在自动驾驶汽车上。
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5540
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5358
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21289
-
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能2020-06-03 6163
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3194
-
谈一谈自动驾驶的激光雷达2021-06-17 13471
-
毫米波/激光/超声波雷达的区别 精选资料推荐2021-07-27 4655
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2318
-
激光雷达和毫米波雷达的区别介绍2018-04-24 45426
-
自动驾驶为什么需要毫米波雷达2018-12-10 9603
-
毫米波雷达和激光雷达到底有什么区别2020-12-29 11736
-
自动驾驶传感器中如何现在激光雷达和毫米波雷达?2023-05-31 2045
-
激光雷达和毫米波雷达的区别 哪个才是自动驾驶感知的最优选择?2023-11-22 10847
-
毫米波雷达与激光雷达比较 毫米波雷达在自动驾驶中的作用2024-12-03 3816
-
自动驾驶中超声波雷达、激光雷达、毫米波雷达有何区别?2025-09-03 2149
全部0条评论

快来发表一下你的评论吧 !
