

如何实现单片机之间的UART串口通信
控制/MCU
描述
通信按照基本类型可以分为并行通信和串行通信。并行通信时数据的各个位同时传送,可以实现字节为单位通信,但是通信线多占用资源多,成本高。比如我们前边用到的 P0 = 0xFE;一次给P0的8个IO口分别赋值,同时进行信号输出,类似于有 8 个车道同时可以过去 8 辆车一样,这种形式就是并行的,我们习惯上还称P0、P1、P2和P3为51单片机的4组并行总线。
而串行通信,就如同一条车道,一次只能一辆车过去,如果一个 0xFE 这样一个字节的数据要传输过去的话,假如低位在前高位在后的话,那发送方式就是 0-1-1-1-1-1-1-1-1,一位一位的发送出去的,要发送 8 次才能发送完一个字节。
STC89C52有两个引脚是专门用来做UART串行通信的,一个是 P3.0 一个是 P3.1,它们还分别有另外的名字叫做 RXD 和 TXD,由它们组成的通信接口就叫做串行接口,简称串口。用两个单片机进行 UART 串口通信,基本的演示图如图 11-1 所示。
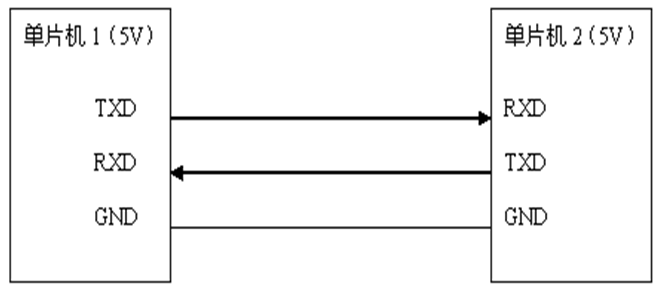
图 11-1 单片机之间UART通信示意图
图中,GND 表示单片机系统电源的参考地,TXD 是串行发送引脚,RXD 是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的 GND 相互连接起来,然后单片机 1 的 TXD 引脚接到单片机 2 的 RXD 引脚上,即此路为单片机 1 发送而单片机 2 接收的通道,单片机 1 的 RXD 引脚接到单片机 2 的 TXD 引脚上,即此路为单片机 2 发送而单片机 1 接收的通道。这个示意图就体现了两个单片机相互收发信息的过程。
当单片机 1 想给单片机 2 发送数据时,比如发送一个 0xE4 这个数据,用二进制形式表示就是 0b11100100,在 UART 通信过程中,是低位先发,高位后发的原则,那么就让 TXD首先拉低电平,持续一段时间,发送一位 0,然后继续拉低,再持续一段时间,又发送了一位 0,然后拉高电平,持续一段时间,发了一位 1??一直到把 8 位二进制数字 0b11100100全部发送完毕。这里就涉及到了一个问题,就是持续的这“一段时间”到底是多久?由此便引入了通信中的一个重要概念——波特率,也叫做比特率。
波特率就是发送二进制数据位的速率,习惯上用 baud 表示,即我们发送一位二进制数据的持续时间=1/baud。在通信之前,单片机 1 和单片机 2 首先都要明确的约定好它们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。
约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?
不管是提前接收还是延迟接收,数据都会接收错误。在 UART 通信的时候,一个字节是 8 位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位 0 表示起始位,然后发送 8 位数据位,数据位是先低后高的顺序,数据位发完后再发一位 1 表示停止位。这样本来要发送一个字节的 8 位数据,而实际上我们一共发送了 10 位,多出来的两位其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到了一位低电平,那就知道了要开始准备接收数据了,接收到 8 位数据位后,然后检测到停止位,再准备下一个数据的接收。我们图示看一下,如图 11-2 所示。
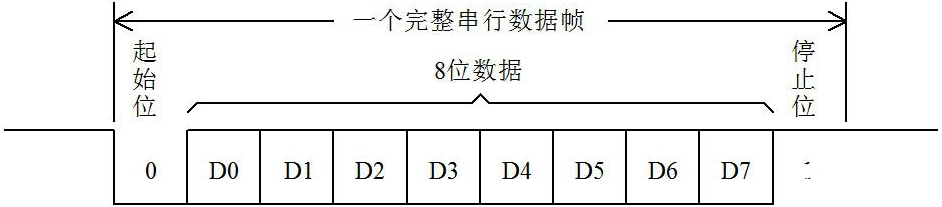
图 11-2 串口数据发送示意图
图 11-2 串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒,如果能够理解时域的概念,后边很多通信的时序图就很容易理解了。
责任编辑;zl
-
两个单片机之间串口通信的例程2023-11-09 12456
-
单片机之UART串口通信相关资料下载2021-12-10 1353
-
单片机UART串口通信(代码亲自调试成功)2021-11-23 1448
-
51单片机串口通信2021-11-18 1317
-
51单片机串口通信的程序实现与Proteus仿真2021-11-12 1199
-
单片机UART串口通信(代码亲自调试成功) 相关资料推荐2021-07-06 1690
-
如何使用51单片机实现串口通信2018-11-21 31370
-
如何实现单片机UART串行数据与CAN数据之间相互转换2018-10-31 23190
-
什么是单片机的串口通信?2018-07-25 62464
-
单片机之间UART通信示意图分享2018-04-11 19080
-
基于51单片机的UART串口通信2017-11-21 64468
-
DSP与单片机串口通信的设计与实现2017-10-20 1232
-
单片机之间的串口通信实例2016-09-01 922
-
单片机视频教程11:异步串口通信UART2012-08-21 14193
全部0条评论

快来发表一下你的评论吧 !
