

轻型载货汽车的电动助力转向系统的控制器研究设计
控制/MCU
描述
前言
近年来,随着电子技术的发展和节能、环保两大主题的推广,电动助力转向系统(EPS)以其优越性能表现得到业界的广泛关注,逐渐成为世界汽车技术发展的重点和热点之一。目前电动助力转向系统在轻型载货汽车上的应用正处于起步期,而作为EPS核心技术——控制器的研究,更是具有重要的理论意义和实践指导价值。本文对某轻型载货汽车的电动助力转向系统的控制器进行了研究和开发。
1 EPS工作过程和原理
汽车转向时,扭矩传感器会检测到驾驶员施加到转向盘上的操纵力。控制单元在接收到扭矩传感器输出的扭矩信号后,结合汽车当前的车速信号对系统所处的运动状态进行判断,进而获得系统当前的控制模式,在数据处理后向电动机驱动器发出运行指令,电动机会根据需要提供相应大小的转矩来达到助力、阻尼或回正控制模式。电动机的转矩通过减速机构增扭后施加在汽车的转向机构上。
EPS的控制原理如图1所示。控制单元ECU控制作为动力源的电机提供助力,达到期望的助力效果。ECU根据车速传感器和扭矩传感器输出信号计算出电动机的目标驱动电流信号,此信号输给驱动电路以驱动电机转动,并经减速机构提供给转向机构助力;电动机由直流电源经继电器、电动机的驱动电路供电;在驱动电路与电动机之间设有霍尔传感器,使ECU能够实时检测电流大小;通过PID控制算法来调整使检测电流值接近目标值,同时能够实现对电流进行监测,当过流的时候,断开继电器以保护电路。
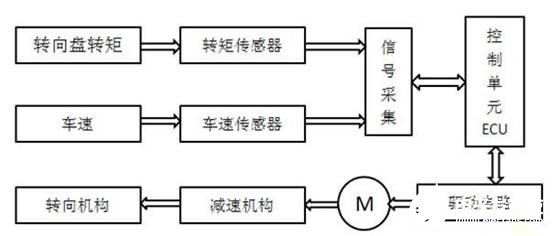
图1 EPS控制原理图
2 EPS控制方法
汽车转向时,扭矩传感器会检测到驾驶员施加到转向盘上的操纵力。控制单元在接收到扭矩传感器输出的信号后,对汽车转向方式进行选择,再结合汽车当前的车速信号对系统所处的运动状态进行判断,进而获得系统当前的控制模式。在数据处理后向电动机驱动器发出运行指令,电机会根据需要提供相应大小转矩来达到助力、阻尼或回正控制模式。电动机的转矩通过减速机构增扭后施加在汽车的转向机构上。本文的控制方法如图2所示。
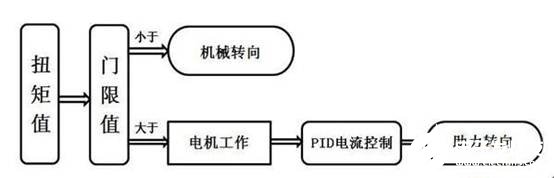
图2 控制方法框图
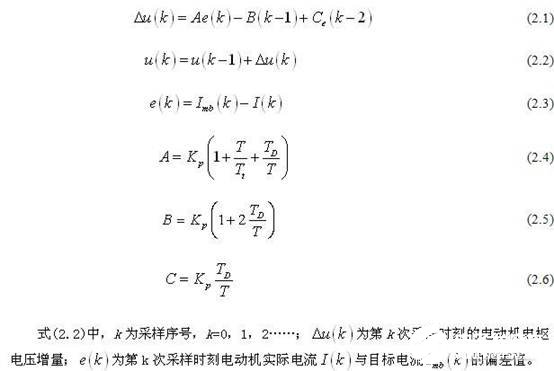
由于单片机控制是一种采样控制,在实现PID控制时,将描述连续系统的微分方程化为离散系统的差分方程,故只能根据采样时刻的偏差值计算控制量。以采样时刻点KT代替连续时间 ,以和式代替积分,以增量式代替微分,则可得到数字PID控制器。电动机电流增量式数字PID控制算法如下:
该方式控制过程简单,使电动助力转向器始终处于一个比较平稳的工作状态,同时还能够获得较好的助力效果。
3 控制器设计
若将转向系统作为汽车的引航者,则可用控制器作为EPS系统的“心脏”以表明其至关重要的作用。硬件电路在控制器中就起着中流砥柱的作用。硬件电路不仅要面对复杂、恶劣的汽车行驶工况,还承载信号指令的接收与发送,所以硬件电路设计的好坏关系着控制器的使用寿命和EPS系统的可靠性;而软件设计则可看成控制器的“大脑”,承担着繁复数据处理的责任和指令发布的功能。
3.1 硬件设计
EPS控制器通过信号调理电路以及芯片的A/D转换器将主要的扭矩信号、车速信号以及电机的反馈电流信号采集后,送入控制器,控制器根据这些数据以及设定的控制策略进行运算处理,通过驱动电路给助力电机输出控制信号。控制器系统结构如图3所示。
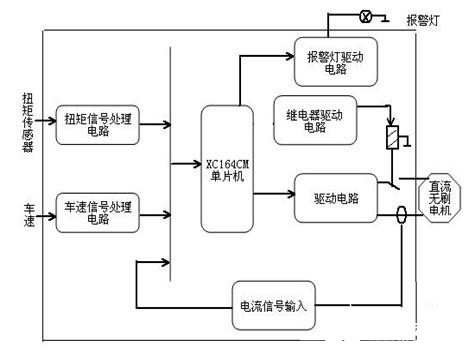
图3控制器结构图
3.1.1 单片机系统
系统选用Infineon公司的增强型16位的XC166家族的XC164CM微控制器作为EPS系统的处理器,它具备出色的数字信号处理(DSP)性能以及先进的中断处理能力。虽然单片机已经将CPU、FLASH、ROM、RAM以及I/O等全部集成在一个电路芯片上,但仍需要有外部电路的支持。通过能够维持单片机运行的最简单配置的电路来构成单片机最小系统。以XC164CM芯片为核心的最小硬件系统主要包括:电源电路、时钟电路、片上调试支持(OCDS)电路、复位电路。
3.1.2 驱动控制电路
本系统采用的是无刷直流电机的平滑驱动方案, 驱动电路如图4所示。控制系统由Infineon公司的三相驱动芯片6ED003L06-F控制SPP80N08S2-07型MOSFET功率管的开关来实现,这将大大简化了电路的规模。三组桥臂(M1、M2,M3、M4,M5、M6)分别对应了W、V、U三相,而且在同一时刻上下桥有且只能各有一个导通以形成唯一通路,这样通过PWM调制和三相相位的调节就实现了调节电机转速和转向的目的。
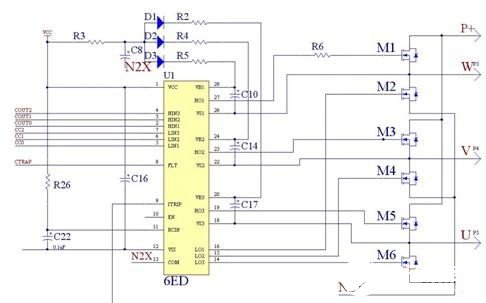
图4驱动控制电路
3.2 软件设计
结合DAVE平台确定出EPS控制系统的软件设计采用模块化设计,利用KeiluVision4
对控制系统软件进行程序代码编写。软件设计根据-电机电流控制的信访室对主程序进行设计,系统的主程序如图5的流程图所示。为了使EPS系统性能更加可靠、稳定,系统对信号采集程序和数字滤波程序进行了设计。
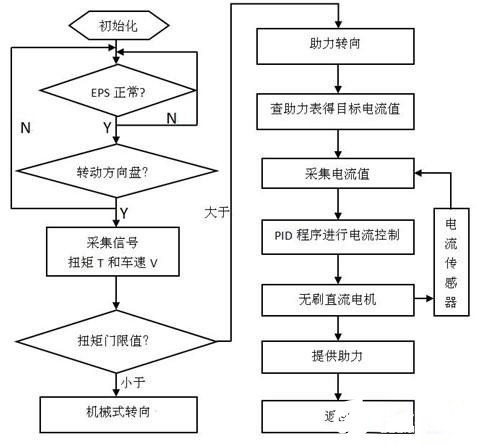
图5主程序流程图
4 控制器的验证
验证时,电动助力转向系统安装在轻型货车上,与转向管柱和转向摇臂分别连接,具体试验设备连接如图6所示。控制器由驱动板、控制板和计算机组成,来完成电动助力转向系统的试验验证。
1——示波器2——计算机3——24V电源4——5V电源 5——驱动板 6——控制板
7——转向器 8——轻型货车
图6 电动助力转向系统试验图
验证过程中,由RMS方向盘传感器将采集到的转向盘扭矩信号输入给示波器,经过计算机的分析处理获得试验力矩曲线。将两组曲线在同一位置开始进行整合,获得无助力和助力曲线的某一工作段对比力矩曲线如图7所示。
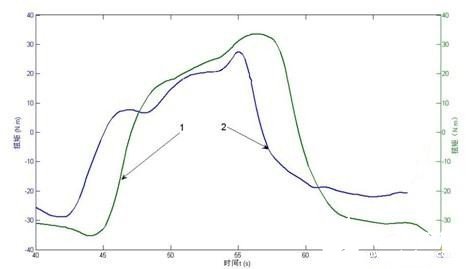
1——转向曲线2——助力转向曲线
图7 原地转向试验对比曲线
从试验曲线可以看出,曲线1在极限转向时的力矩值均超过30N•m,而曲线2的力矩值被控制在30N•m范围之内。与纯机械转向相比,采用电动助力转向系统能够有效的减少转向盘输入扭矩,实现助力控制。
5 结论
电动助力转向系统通过转向试验的验证,证明了系统的控制方法和控制器的设计方式的可行性,使该电动助力转向系统能够满足预期设计的要求。试验过程中,驾驶员能够感觉到利用电机的阻力矩以及反充电原理可以获得回正和阻尼控制的效果。通过电动助力转向系统的效果验证,虽然控制器能够满足试验要求,但无论在软件上还是硬件上都需要进行完善,以实现产品化的目标。
-
关于电动系统设计2011-09-30 2553
-
分析汽车转向电动机工作原理及转向系统2018-10-10 2699
-
AMEYA360设计方案丨电动助力转向系统模块解决方案2018-11-22 2108
-
电动助力转向系统EPS的原理是什么?2019-10-16 3618
-
电动助力转向系统扭矩传感器的原理是什么2020-04-22 4928
-
电动助力转向系统控制器的设计方案2020-07-29 2577
-
请问怎样去设计汽车电动助力转向系统(EPS)?2021-05-10 2366
-
汽车电动助力转向系统EPS原理是什么?2021-05-13 2680
-
电动助力转向系统 相关资料分享2021-06-30 2015
-
汽车电动助力转向系统特性研究2009-07-27 820
-
汽车电动助力转向系统电控单元的研究2009-12-09 2750
-
基于LabVIEW的汽车助力转向控制系统设计2010-01-23 1384
-
汽车电动助力转向系统控制器双机容错研究2010-03-11 2269
-
汽车电动液压助力转向电子控制系统的研究2016-04-26 1097
-
基于ARM的汽车电动助力转向控制系统的设计2017-09-01 834
全部0条评论

快来发表一下你的评论吧 !
