

机器人末端的夹持机构要结合实际工作环境来设计
机器人
555人已加入
描述
(文章来源:OFweek)
对于工业机器人来说,搬运物料是其抓取作业方式中较为重要的应用之一。工业机器人作为一种具有较强通用性的作业设备,其作业任务能否顺利完成直接取决于夹持机构,因此机器人末端的夹持机构要结合实际的作业任务以及工作环境的要求来设计,这导致了夹持机构结构形式的多样化。
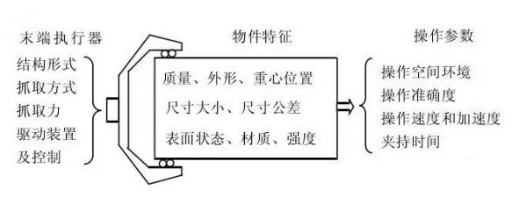
大多数机械式夹持机构为双指头爪式,根据手指运动方式的可分为:回转型、平移型;夹持方式的不同又可分成内撑式与外夹式;根据结构特性可分为气动式、电动式、液压式及其组合夹持机构。气压传动的气源获取较为方便,动作速度快,工作介质无污染,同时流动性优于液压系统,压力损失较小,适用于远距离控制。
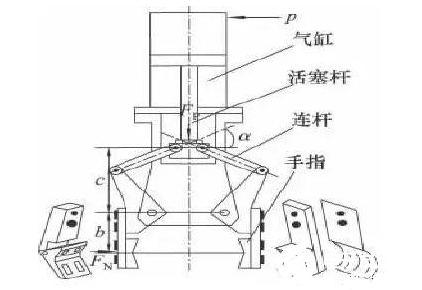
1.回转型连杆杠杆式夹持机构,该种装置的手指(如V型手指、弧形手指)通过螺栓固定在夹持机构上,更换较为方便,因此能够显著扩大夹持机构的应用场合。
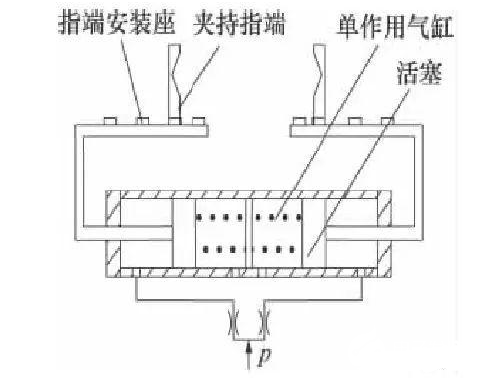
2.直杆式双气缸平移夹持机构,这种夹持机构的指端通常安装于配备有指端安装座的直杆上,当压力气体进入单作用式双气缸的两个有杆腔时,会推动活塞逐渐向中间移动,直至将工件夹紧。
3.连杆交叉式双气缸平移夹持机构,一般由单作用双联气缸与交叉式指部构成。气体进入气缸的中间腔后,会推动两个活塞往两边运动,从而带动连杆运动,交叉式指端便会将工件牢牢固定;如果没有空气进入中间腔体,活塞会在弹簧推力的作用下复位,固定的工件会被松开。
4.内撑式连杆杠杆式夹持机构,通过四连杆机构实现力的传递,其撑紧方向和外夹式相反,主要用于抓取带有内孔的薄壁工件。夹持机构撑紧工件后,为了确保其能够顺利的用内孔定位,通常安装 3 个手指。
(责任编辑:fqj)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人末端抓手的工作原理及结构设计2023-11-04 3064
-
电力铁塔攀爬机器人夹持机构设计与分析2023-10-31 707
-
机器人是什么?2022-03-31 22334
-
四足机器人的机构设计2021-09-15 2172
-
ZN-IRF02工业机器人视觉分拣实训系统 精选资料分享2021-07-13 1995
-
工业喷涂机器人实训系统设计2021-07-01 1949
-
AI物流机器人结合实际应用解决“最后三公里”配送难题2020-09-27 3794
-
工业机器人是如何来完成日常工作的2019-10-19 3258
-
什么是工业机器人夹爪它有什么用2019-09-02 6669
-
工业机器人那些各种各样的手,你都知道吗?2019-03-08 6621
-
工业机器人到底有多少种手多种工业机器人夹持机构结构介绍2019-01-13 12750
-
拆开工业机器人,让你见识机器人驱动系统中的电机种类2018-10-30 2723
-
工业机器人的工作原理2017-12-15 4821
-
多感知机器人夹持器设计2015-12-23 558
全部0条评论

快来发表一下你的评论吧 !
