

伺服控制MCU与现有的MCU相比 具备以下特点
控制/MCU
描述
对于角旋转位置反馈的伺服电机来说,一般都是通过施加脉冲宽度调制(PWM)信号,以精确控制运动。工程师可以通过改变PWM信号的宽度来改变电动机的旋转角度和方向,因此生成PWM信号的MCU的作用至关重要。
微控制器使用计时器生成PWM信号,然后可以修改配置以控制旋转伺服器手臂,这是一类特殊的电动机,通常用于在工业机器人,CNC机械和自动化制造中创建闭环控制系统。
伺服电动机利用位置反馈来控制其运动和最终位置,这需要相对复杂的微控制器。另一方面,由于使用高速缓存,通用处理器可能会出现问题。高速缓存的运行时间变化很大,这可能会影响伺服电机的控制。
伺服控制微控制器
那么,伺服控制MCU与现有的MCU相比,伺服控制MCU具有什么特点?首先,这些MCU内置IP针对工业机器人和电机控制进行了优化,以促进对伺服电机的高级控制。
伺服控制MCU的剖析
MCU内的专用硬件加速器可促进在工业机器人和其他工厂自动化应用中实施伺服控制所需的高速位置计算。在短至1.5 µs的时间范围内执行的电流控制环路计算也使开发人员能够创建低成本的伺服系统。

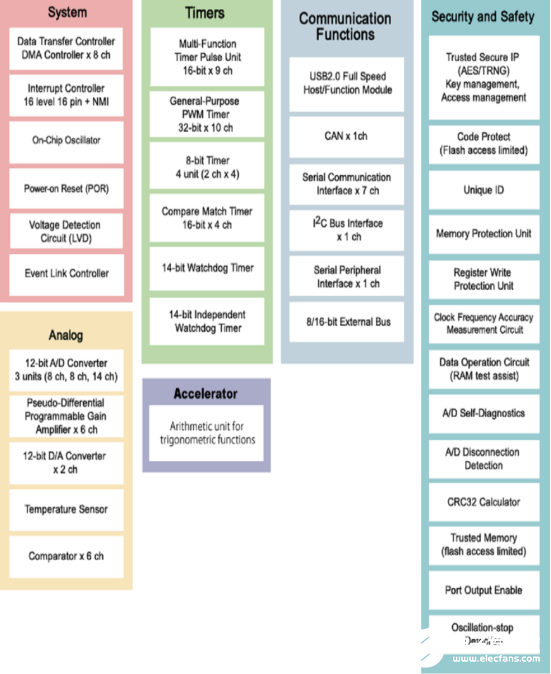
伺服控制MCU的框图,在左第二栏中显示了计时器和加速器(图片:瑞萨电子)。
值得一提的是,伺服控制计算也可以在软件中执行,但是这会给主MCU或MPU带来过多的计算开销。但是,与此同时,完全基于硬件的计算平台可能影响工程最终部署。
这就需要带有内置IP的MCU,这些IP可以提高特定电机控制应用的计算速度和中断处理的精度。具有专用硬件加速器IP的电机控制MCU可以执行机器人和其他工业自动化设备中的伺服控制所需的复杂,高速计算。
此外,伺服控制MCU集成了硬件加密技术,以确保工业设计的安全性和可靠性。
同时,新型的AI算法也可使开发人员能够在单个MCU中采用诸如电机控制故障检测之类的功能。
简而言之,伺服控制MCU正在快速发展,以解决快速发展的物联网(IoT)时代的新工业设计要求。
-
如何使用现有的MCU实现处理器性能2019-03-19 4040
-
MCU 8051 IDE 教程电子学习 2023-01-14
-
如何实现有效的MCU设计2016-06-29 4321
-
国民技术MCU特点是什么2021-11-01 3080
-
伺服电机中32位MCU的应用2011-07-01 3365
-
汽车mcu是什么意思,它的特点是什么2021-07-09 5531
-
如何轻松向现有的MCU添加低功耗蓝牙2021-12-16 2469
-
TI全新Sitara™︎ AM2x系列重新定义MCU,处理能力相比现有器件提高10倍2022-10-28 714
-
先楫高性能MCU在多轴伺服控制的应用2022-12-05 2669
-
简述MCU主流品牌和其特点2023-03-19 3852
-
认证模块轻松向现有的MCU添加低功耗蓝牙2023-04-10 1380
-
什么是MCU?mcu的特点有哪些2023-07-28 6289
-
基于极海半导体APM32F407系列MCU的伺服控制器应用方案2023-09-19 2533
-
MCU IO口的作用和特点2024-09-30 5106
-
使用MSP430™ MCU的伺服电机控制器2024-10-09 506
全部0条评论

快来发表一下你的评论吧 !
