

基于微机技术和执行器技术为一体的电动执行机构的设计方案
伺服与控制
描述
提出一种新型电动执行机构的设计方案,详细介绍了该执行机构各功能元件的选型与设计、阀位及速度控制原理以及各种关键问题的解决方法。该执行机构将阀门、伺服电机、控制器合为一体,采用8031单片机、变频技术实现了阀门的动作速度和位置控制,解决了阀门的精确定位、阀门柔性开关、极限位置判断、电机保护及模拟信号隔离等技术问题。现场运行情况表明,该电动执行机构具有动作快、保护完善以及便于和计算机通讯等优点。
1、引言
在现代化生产过程控制中,执行机构起着十分重要的作用,它是自动控制系统中不可缺少的组成部分。现有的国产大流量电动执行机构存在着控制手段落后、机械传动机构多、结构复杂、定位精度低、可靠性差等问题。而且执行机构的全程运行速度取决于其电机的输出轴转速和其内部减速齿轮的减速比,一旦出厂,这一速度固定不可调整,其通用性较弱。整个机构缺乏完善的保护和故障诊断措施以及必要的通信手段,系统的安全性较差,不便与计算机联网。鉴于以上原因,采用传统的大流量电动执行机构的控制系统,可靠性和稳定性较差。随着计算机网络、现场总线等技术在工业过程中的应用,这种执行机构已远远不能满足工业生产的要求。笔者设计的大流量电动执行机构,采用机电一体化技术,将阀门、伺服电机、控制器合为一体,利用异步电动机直接驱动阀门的开与关。通过内置变频器,采用模糊神经网络,实现阀门的动作速度、精确定位、柔性开关以及电机转矩等控制。该电动执行机构省去了用于控制电机正、反转的接触器和可控硅换向开关模件、机械传动装置和复杂、昂贵的控制柜和配电柜,具有动作快、保护较完善、便于和计算机联网等优点。实际运行表明,该执行机构工作稳定,性能可靠。
2、电动执行机构的硬件设计及工作原理
电动执行机构控制系统原理框图如图2-1所示。智能执行机构从结构上主要分为控制部分和执行驱动部分。
控制部分主要由单片机、PWM波发生器、IPM逆变器、A/D、D/A转换模块、整流模块、输入输出通道、故障检测和报警电路等组成。执行驱动部分主要包括三相伺报电机和位置传感器。
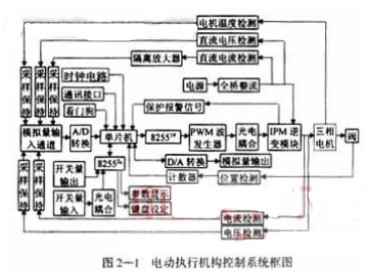
系统工作原理:
霍尔电流、电压传感器及位置传感器检测到的逆变模块三相输出电流、电压及阀门的位置信号,经A/D转换后送入单片机。单片机通过8255控制PWM波发生器,产生的PWM波经光电耦合作用于逆变模块IPM,实现电机的变频调速以及阀位控制。逆变模块工作时所需要的直流电压信号由整流电路对380V电源进行全桥整流得到。
控制系统各功能元件的选型与设计:
1)单片机 选用INTEL公司生产的8031单片机,它主要通过并行8255口担负控制系统的信号处理:接收系统对转矩、阀门开启、关闭及阀门开度等设定信号,并提供三相PWM波发生器所需要的控制信号;处理IPM发出的故障信号和报警信号;处理通过模拟输入口接收的电流、电压、位置等检测信号;提供显示电动执行机构的工作状态信号;执行控制系统来的控制信号,向控制系统反馈信号;
2)三相PWM波发生器 PWM波的产生通常有模拟和数字两种方法。模拟法电路复杂,有温漂现象,精度低,限制了系统的性能;数字法是按照不同的数字模型用计算机算出各切换点,并存入内存,然后通过查表及必要的计算产生PWM波,这种方法占用的内存较大,不能保证系统的精度。为了满足智能功率模块所需要的PWM波控制信号,保证微处理器有足够的时间进行整个系统的检测、保护、控制等功能,文中选用MITEL公司生产的SA8282作为三相PWM发生器。SA8282是专用大规模集成电路,具有独立的标准微处理器接口,芯片内部包含了波形、频率、幅值等控制信息。
3)智能逆变模块IPM 为了满足执行机构体积小,可靠性高的要求,电机电源采用智能功率模块IPM。该执行机构主要适用功率小于5.5kW的三相异步电机,其额定电压为380V,功率因数为0.75。经计算可知,选用日本产的智能功率模块PM50RSA120可以满足系统要求。该功率模块集功率开关和驱动电路、制动电路于一体,并内置过电流、短路、欠电压和过热保护以及报警输出,是一种高性能的功率开关器件。
4)位置检测电路 位置检测电路是执行机构的重要组成部分,它的功能是提供准确的位置信号。关键问题是位置传感器的选型。在传统的电动执行机构中多采用绕线电位器、差动变压器、导电塑料电位器等。绕线电位器寿命短被淘汰。差动变压器由于线性区太短和温度特性不理想而受到限制。导电塑料电位器目前较为流行,但它是有触点的,寿命也不可能很长,精度也不高。笔者采用的位置传感器为脉冲数字式传感器,这种传感器是无触点的,且具有精度高、无线性区限制、稳定性高、无温度限制等特点。
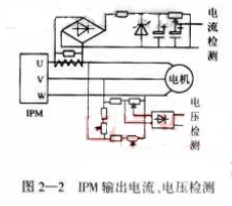
5)电压、电流及检测 检测电压、电流主要是为了计算电机的力矩,以及变频器输出回路短路、断相保护和逆变模块故障诊断。由于变频器输出的电流和电压的频率范围为0~50Hz,采用常规的电流、电压互感器无法满足要求。为了快速反映出电流的大小,采用霍尔型电流互感器检测IPM输出的三相电流,对于IPM输出电压的检测采用分压电路。如图2-2所示。
6)通讯接口 为了实现计算机联网和远程控制,选用MAX232作为系统的串行通讯接口,MAX232内部有两个完全相同的电平转换电路,可以把8031串行口输出的TTL电平转换为RS-232标准电平,把其它微机送来的RS-232标准电平转换成TTL电平给8031,实现单片机与其它微机间的通讯。
7)时钟电路 时钟电路主要用来提供采样与控制周期、速度计算时所需要的时间以及日历。文中选用时钟电路DS12887。DS12887内部有114字节的用户非易失性RAM,可用来存入需长期保存的数据。
8)液晶显示单元 为了实现人机对话功能,选用MGLS12832液晶显示模块组成显示电路。采用组态显示方式。通过菜单选择,可分别对阀门、力矩、限位、电机、通讯和参数等信号进行设置或调试。并采用文字和图形相结合的方式,显示直观、清晰。
9)程序出格自恢复电路 为了保证在强干扰下程序出格时系统能够自动地恢复正常,选用MAX705组成程序出格自恢复电路,监视程序运行。如图2-3所示,该电路由MAX705、与非门及微分电路组成。
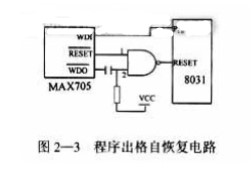
工作原理为:一旦程序出格,WDO由高变低,由于微分电路的作用,由“与非”门输入引脚2变为高电平,引脚2电平的这种变化使“与非”门输出一个正脉冲,使单片机产生一次复位,复位结束后,又由程序通过P1.0口向MAX705的WDI引脚发正脉冲,使WDO引脚回到高电平,程序出格自恢复电路继续监视程序运行。
3、阀位及速度控制原理
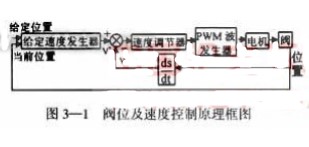
采用双环控制方案,其中内环为速度环,外环为位置环。速度环主要将当前速度与速度给定发生器送来的设定速度相比较,通过速度调节器改变PWM波发生器载波频率,实现电机的转速调节。速度调节器采用模糊神经网络控制算法(具体内容另文叙述)。
外环主要根据当前位置速度的设定,通过速度给定发生器向内环提供速度的设定值。由于大流量阀执行机构在运行过程中存在加速、匀速、减速等阶段。各阶段的时间长短、加速度的大小、在何位置开始匀速或减速均与给定位置、当前位置以及运行速度有关。速度给定发生器的工作原理为:通过比较实际阀位与给定阀位,当二者不相等时,以恒定加速度加速,减速点根据当前速度、阀位值、阀位给定值的大小计算得来。
执行机构各阶段运行速度的计算原理
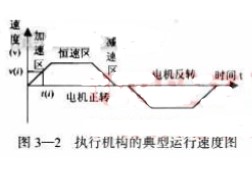
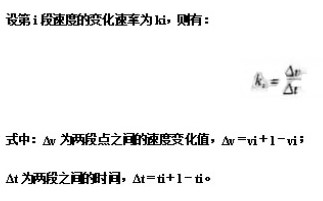
图3-2为执行机构的典型运行速度图,它由若干段变化速率不同的折线组成。将曲线上速率开始发生改变的那一点称为起始段点,相应的时间称为段起始时间,t(i)(i=0,1,2,……),相应的速度称为段起始速度,v(i)(i=0,1,2,…)。
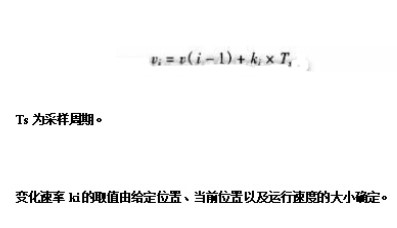
显然,当ki=0时为恒速段,ki>0时为升速段,ki<0时为减速段。任意时刻的速度给定值为:
4、关键技术问题的解决
该电动执行机构采用了最新的变频调速技术,电机驱动功率小于5.5kW。用户可根据需要设定力矩特性,根据控制的阀设定速度,速度分多转式、直行程、角行程3种方式。控制系统由阀位给定和阀位反馈信号构成的闭环系统,控制特性视运行方式、速度而定,并具有自动过流保护、过载保护、超压、欠压、过热、缺相、堵转等保护功能。
该执行机构解决的关键性技术问题主要有:
1)阀门柔性开关 柔性开关主要是为了当阀关闭或全开时,保证阀门不卡死与损伤。执行机构内部的微处理器根据测得的变频器输出电压和电流,通过精确计算,得出其输出力矩。一旦输出力矩达到或大于设定的力矩,自动降低速度,以避免阀门内部过度的撞击,从而达到最优关闭,实现过力矩保护。
2)阀位的极限位置判断 阀位的极限位置是指全开和全关位置。在传统执行机构中,该位置的检测是通过机械式限位开关获得的。机械式限位开关精度低,在运行中易松动,可靠性差。在文中,电动执行机构极限位置通过检测位置信号的增量获得。其原理是,单片机将本次检测的位置信号与上次检测的信号相比较,如果未发生变化或变化较小,即认为己达到极限位置,立即切断异步电机的供电电源,保证阀门的安全关闭或全开。省去了机械式限位开关,无需在调试时对其进行复杂的调整。
3)电机保护的实现 为了防止电机因过热而烧毁,单片机通过温度传感器连续检测电机的实际运行温度,如果温度传感器检测到电机温度过高,自动切断供电电源。温度传感器内置于电机内部。
4)准确定位 传统的电动执行机构在异步电机通电后会很快达到其额定动作速度,当接近停止位置时,电机断电后,由于机械惯性,其阀门不可能立即停下来,会出现不同程度的超程,这一超程通常采用控制电机反向转动来校正。机电一体化的大流量电动执行机构根据当前位置与给定位置的差值以及运行速度的大小超前确定减速点的位置及减速段变化速率ki,使阀门在较低的速度下实现精确的微调和定位,从而将超程降到最低。
5)模拟信号的隔离。
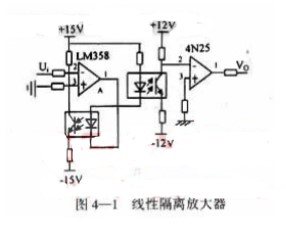
对于变频器的直流电压以及输出的三相电压,它们之间的地址不一致,存在着较高的共模电压,为了保证系统的安全性,必须将它们彼此相互隔离。采用LM358和4N25组成了隔离线性放大电路。如图4-1所示,采用±15V和±12V两组独立的正负电源。若运放A的反相端电位由于扰动而正向偏离虚地,则运放A输出端的电位将降低,因而光电耦合器的发光强度将增强,则使其集射极电压减小,最后使运放A反相端的电位降低,回到正常状态。若A的反相端电位负向偏离虚地,也可以重回到正常状态。从而增强了系统的抗干扰性。
5、结束语
该执行机构集微机技术和执行器技术于一体,是一种新型的终端控制单元,其电机是通过内部集成的一体化变频器来控制,因此,同一台智能执行机构可以在一定范围内具有不同的运行速度和关断力矩。该智能执行机构采用了液晶显示技术,它利用内置的液晶显示板,不仅可以显示阀门的开、关状态和正常运行时阀门的开度,还可以通过菜单选择运行参数设定,当系统出现故障时,能显示出故障信息。总之,该执行机构集测量、决断、执行3种功能于一体,顺应了电动执行机构的发展趋势,它的研制成功给电动执行机构的研究开发提供了新的思路。
责任编辑:gt
-
基于机电一体离合器执行器的设计2023-03-17 2641
-
气动执行器与电动执行器:哪个更好?2023-03-13 13004
-
电动执行器的未来发展方向是怎样的2022-04-30 5603
-
风门执行器是什么,它的作用是怎样的2021-03-21 10635
-
对于防爆电动执行器我们该如何挑选2021-02-24 2925
-
执行器由什么组成_执行器的工作原理2021-01-21 13756
-
关于智能化欧玛执行器与一般电动执行机构的对比2021-01-04 1302
-
智能电动执行器的特点、类别对比和发展趋势分析2020-06-13 9249
-
电动执行器基础知识2017-08-17 2738
-
基于DSP实现的SDZ智能电动执行机构2010-03-02 586
-
基于CAN总线的电动执行机构的设计2010-02-21 661
-
基于DSP的电动执行机构的设计与实现2010-01-13 1108
-
电动执行机构传递函数的研究2009-03-17 1191
-
普立斯曼VALPES电动执行机构2008-05-01 1721
全部0条评论

快来发表一下你的评论吧 !
