

基于STM32、FreeRTOS 实现硬件看门狗+软件看门狗监测多任务的方法
描述
我们都知道硬件看门狗的目的:是用来监测系统,防止系统死机,并在死机的情况下使系统复位重启。
在RTOS操作系统中,如果任务(线程)较多,出现高优先级任务长时间占用CPU资源,低优先级任务长时间得不到执行这种想象,那么我们的系统就是具有Bug的系统。
如上描述,假如我们的线程没有死机,只是长时间得不到执行。在这种异常情况下,我们又不希望系统复位,只希望执行特定代码,那我们该如何来避免这种问题呢?
Ⅰ关于看门狗
硬件看门狗:利用一个定时器计数电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时“喂狗”。
因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。如果程序出现故障,不在定时周期内喂狗,就使得看门狗定时器溢出产生复位信号并重启系统。
在STM32中,有两个看门狗:独立看门狗和窗口看门狗。原理和功能都类似,只是应用场景不一样。
软件看门狗:软件看门狗和硬件看门狗原理类似,都是定期(在时间溢出之内),对其喂狗。只是软件喂狗的方式是通过自身设计的计数来实现。
Ⅱ硬件+软件看门狗监测多任务的原理
1.利用一个监测线程(自身),来监测其它多个线程;
2.利用硬件看门狗来监测自身。
如图:
假如我系统中有多个应用线程(如上图),我就利用一个监测线程(自身),来监测其它多个应用线程。
同时,为了防止自身线程异常,利用一个硬件看门狗来监测自身。这样就可以做到双重监测的作用。
Ⅲ结合软件来讲原理
上一节上述的原理可能对于有些人来说,是比较抽象的。那么这一节来看看代码:
监测线程(自身):
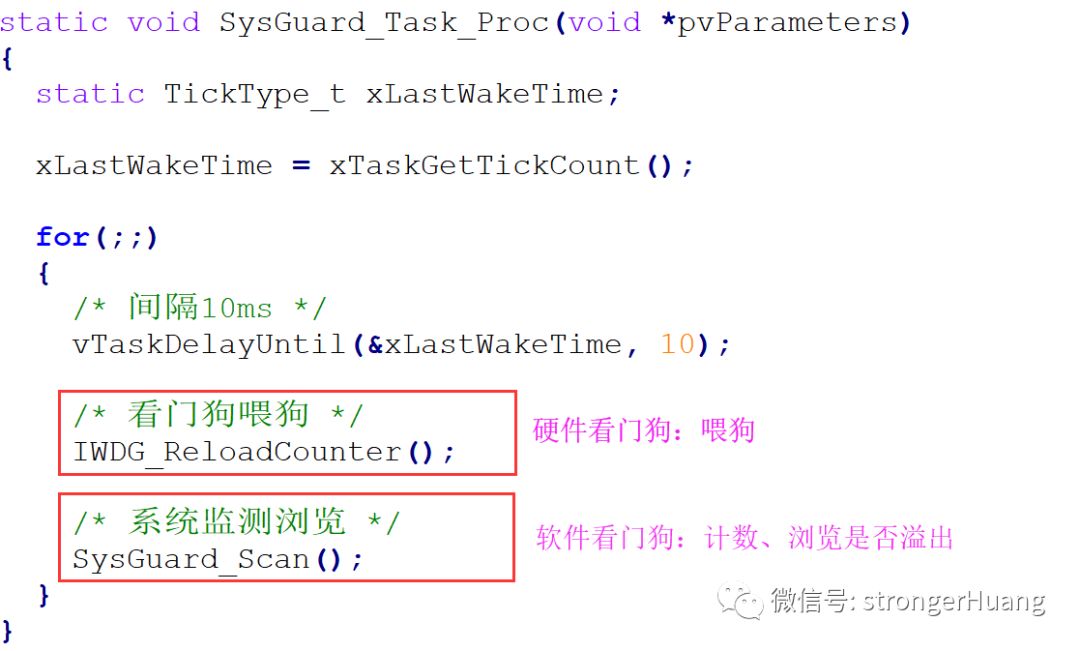
简单来说:在监测线程(自身)之中,需要对硬件看门狗进行喂狗。软件看门狗的角色:在这里就是对齐计数,浏览是否溢出,我把它封装成一个浏览函数。具体的喂狗就在其他各个被监测的线程中。
那么,再看软件看门狗对其中一个应用线程喂狗的代码:
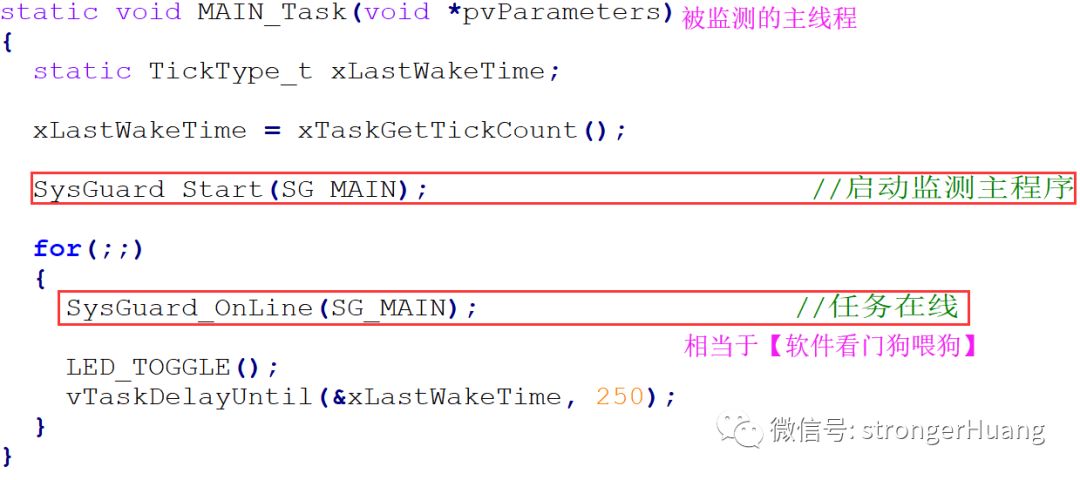
这里只是简单的举例,一个主线程里面的喂狗。相当于:我线程启动之后,就需要定时喂狗。如果这里长时间不喂狗,那么监测线程(自身)就会发现你没有喂狗。
Ⅳ简答的实现方法
看到这里,相信大家都知道其原理了。具体实现的方式方法很多种,可根据自己实际项目需要,添加相应的接口。这里举例几点吧。
定义一个数据结构:
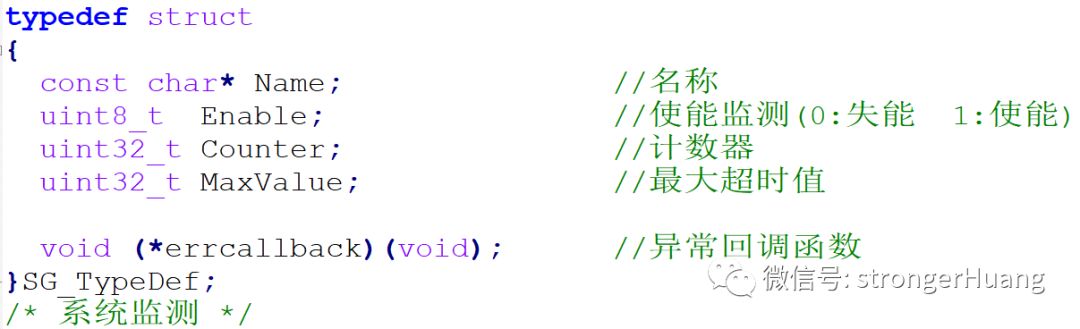
这里举例,是实现最基础的东西,比如计数器,最大超时值等。
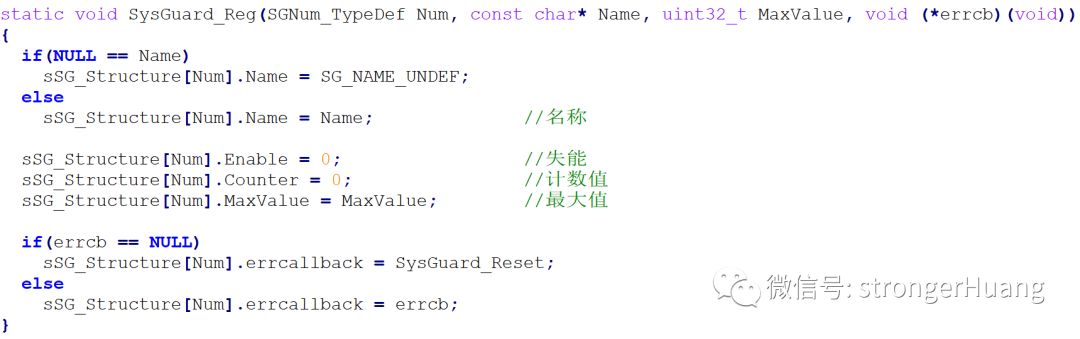
注册接口函数:
监测浏览函数接口:
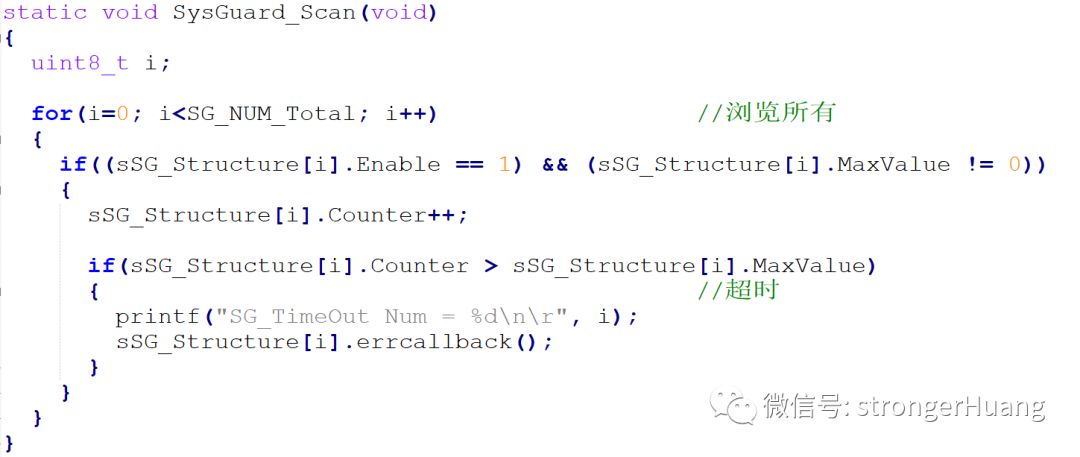
以上只是教大家方法,具体的实现,可自己根据自己习惯,项目需求来定制化开发。
-
软件看门狗和硬件看门狗的区别2024-04-16 3062
-
MCU硬件看门狗+软件看门狗监测多任务的思路2023-10-24 3111
-
STM32中的独立看门狗和窗口看门狗是什么2023-02-20 5361
-
STM32中的独立看门狗和窗口看门狗2022-12-22 3672
-
FreeRTOS使用看门狗的步骤2022-09-13 7161
-
STM32:独立看门狗、窗口看门狗的配置2022-02-08 1542
-
如何去实现一种硬件+软件看门狗监测多任务方案2021-08-05 1412
-
软件看门狗和硬件看门狗的作用和区别2019-10-15 41353
-
看门狗多任务系统及喂狗方法详解2018-07-05 20003
-
uC/OS-II 系统的多任务看门狗设计2017-11-30 1069
-
STM32看门狗配置(独立看门狗IWDG和窗口看门狗WWDG)2017-11-09 9057
-
什么是stm32看门狗?独立看门狗和窗口看门狗工作原理解析2017-11-06 28637
-
stm32看门狗时间计算 独立看门狗和窗口看门狗的特性是什么2016-10-10 9528
-
什么是看门狗电路2008-10-21 8885
全部0条评论

快来发表一下你的评论吧 !
