

STM32F4_TIM输入波形捕获 (脉冲频率、占空比)
描述
Ⅰ、概述
本文基于上一篇文章“TIM输入波形捕获(脉冲频率)”的基础上进行拓展,上一篇文章主要是捕获波形的频率,本文主要拓展捕获波形的占空比。
笔者实验测试的方法和上一篇文章一样,通过信号发生器产生PWM信号,通过串口发送频率和占空比到上位机(上位机串口助手显示其数值)。(没有信号发生器的朋友可以结合上一篇文章PWM输出做信号源;在同一块板子上也可以使用不同定时器,将PWM输出引脚接在捕获输入引脚)
实验现象:不同频率的实验现象请看上一篇文章(该文章提供的工程笔者也是进行了大量不同频率的测试,误差在几Hz属正常范围)。
1000Hz、20% - 80%占空比现象:
1000Hz、51% - 58%占空比现象:
关于本文的更多详情请往下看。
Ⅱ、实例工程下载
笔者针对于初学者提供的例程都是去掉了许多不必要的功能,精简了官方的代码,对初学者一看就明白,以简单明了的工程供大家学习。
笔者提供的实例工程都是在板子上经过多次测试并没有问题才上传至360云盘,欢迎下载测试、参照学习。
提供下载的软件工程是STM32F417的,但F4其他型号也适用(适用F4其他型号:关注微信,回复“修改型号”)。
STM32F4_TIM输入波形捕获(脉冲频率、占空比)实例:
https://yunpan.cn/cB2iknrjczWXe 访问密码 764c
STM32F4资料:
https://yunpan.cn/cR2pxqF5x2d9c 访问密码 53e7
Ⅲ、原理描述
笔者将捕获PWM波形简单画了一个示意图:
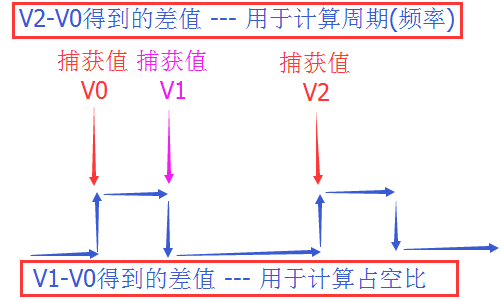
从上面的示意图可以看得出来我们需要捕获三个值(两个上升沿和中间的下降沿)。两个上升沿用于计算一个波形的周期(也就是可以计算其频率),因为捕获的“周期差值”就是脉冲数,而通过配置,我们可以知道每一个脉冲数的时间,这样就知道整个“周期差值”的时间。得到了“占空比差值”和“周期差值”,波形的占空比就得到了。
笔者将TIM分为三大块:时基部分、比较输出和输入捕获,请看下面截图“通用TIM框图”。
前面的文章已经将“时基部分”的一些基础知识讲述过了,“时基部分”的功能是比较有用的,它除了可以用来延时(定时)之外,它还可以拿来触发其他一些功能,如:触发DA转换、AD采集等。
上一篇文章讲述的就是图中比较输出部分,比较输出部分功能相对比较简单。
该文主要讲述“输入捕获”部分,这部分输入的通道1与2、通道3与4可以相互协作。该文只使用了TIM5的通道3,捕获输入信号频率。
通用TIM框图:
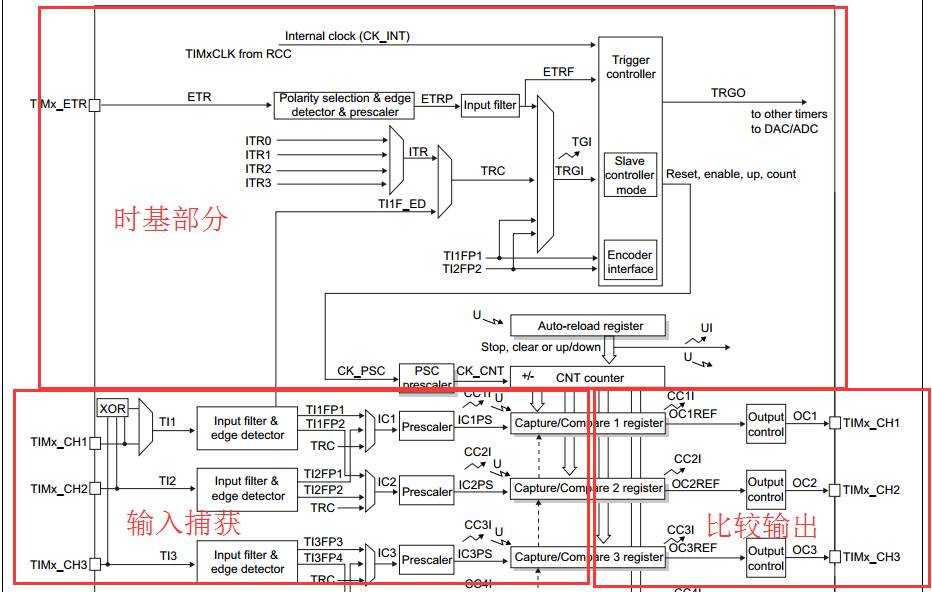
上面两图截取“STM32F4x5、x7参考手册”建议下载手册参看。
Ⅳ、源代码分析
笔者以F4标准外设库(同时也建议初学者使用官方的标准外设库)为基础建立的工程,主要以库的方式来讲述。
源代码很多地方都是和上一篇文章源代码相同,只修改了几个地方(其实主要就是增加了一路捕获占空比相关的配置):输入引脚的配置、TIM捕获配置及其中断、中断函数处理、主函数发送数据。
RCC、NVIC等这些容易忘记配置的地方都一样。
1.TIM输入捕获引脚配置
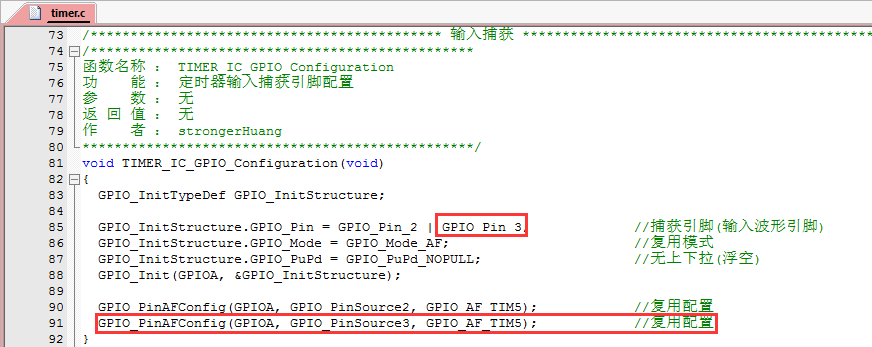
该函数位于timer.c文件下面;
主要增加了一路引脚。
注意2点:
A.引脚与通道对应:这个需要参看“数据手册”,该文TIM5通道3对应的引脚就是PA2.
B.复用配置:GPIO_PinAFConfig(GPIOA,GPIO_PinSource2, GPIO_AF_TIM5);
这个地方对于F1转F0、F4等的朋友需要注意,更加芯片系列及库的不同,他们之间存在一定的差异。
2.TIM输入捕获配置
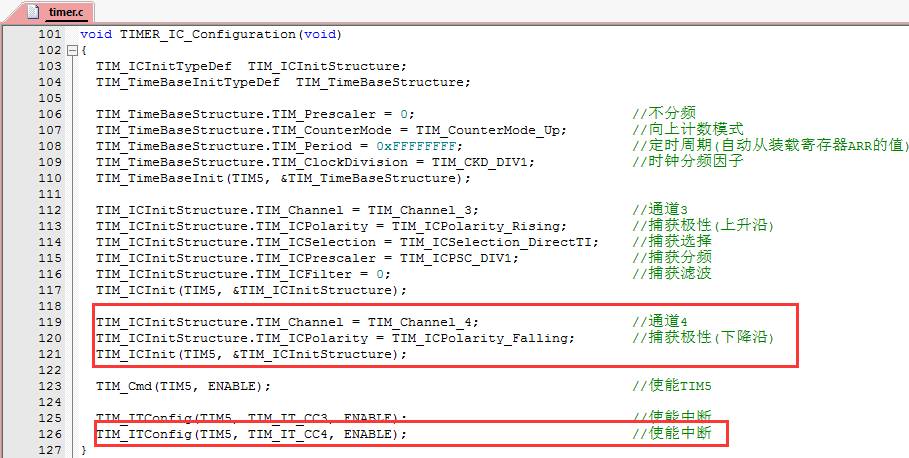
该函数位于timer.c文件下面;
“时基部分”是在前面两篇文章讲述过的,这里主要对“输入捕获”部分理解,主要5个参数:
捕获通道:就是我们捕获的通道;
捕获极性:就是我们捕获脉冲的高还是低电平;
捕获选择:是直接捕获该通道,还是上面说的1,2通道协助捕获;
捕获分频:对捕获的脉冲分频;
捕获滤波:过滤掉波形;
3.计算捕获波形频率原理
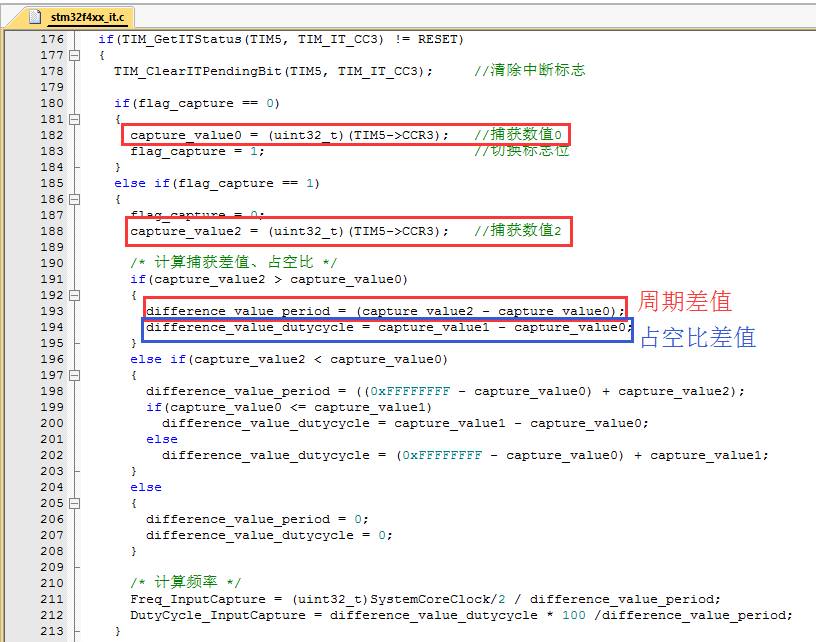
该函数位于stm32f4xx_it.c文件下面;
该函数是TIM捕获波形的中断函数,同一个(TIM5)中断入口,有两个通道通道,也是计算频率和占空比重要的函数;
结合原理描述中“示意图”可以知道,我们需要捕获3个值:V0、V2和V1。
V0和V2是在通道3捕获:
capture_value0 = (uint32_t)(TIM5->CCR3);
capture_value2 = (uint32_t)(TIM5->CCR3);
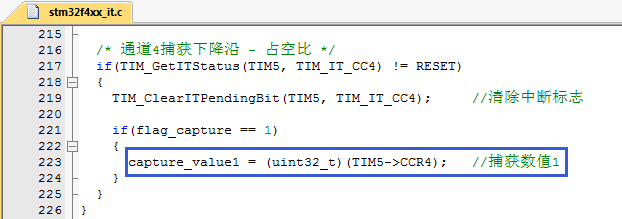
V1在通道4捕获:
capture_value1 = (uint32_t)(TIM5->CCR4);
其中有一个标志位flag_capture是用于标志我们捕获的状态,我们捕获了V0将flag_capture= 1就是告诉程序我们要捕获V1 和 V2的值了。
-
STM32CUBEIDE(12)----定时器TIM捕获PWM测量频率与占空比2026-06-16 101
-
STM32CUBEMX开发GD32F303(13)----定时器TIM捕获PWM测量频率与占空比2022-12-07 5432
-
STM32使用TIM2和TIM3同时捕获8路波形2022-01-06 975
-
【国信长天蓝桥杯】③ STM32G431 TIM输入捕获,定时器输入捕获频率测量使用步骤2021-11-30 1096
-
基于STM32f103的输入捕获测频率和占空比2021-08-02 3301
-
STM32F4_TIM输入波形捕获 (脉冲频率)2020-04-07 6693
-
STM32F4_TIM输出PWM波形 (可调频率、占空比)2020-03-24 16249
-
STM32如何实现可调频率、 占空比的PWM波形,且可指定输出脉冲个数?2020-03-12 29717
-
stm32定时器输入捕获2017-10-13 24852
-
stm32定时器TIm3脉冲捕获问题2017-08-29 6085
全部0条评论

快来发表一下你的评论吧 !
