

两款伺服电机控制电路图
电子说
描述
伺服电机控制原理:
伺服电机是机器人非常重要的一个零件,伺服电机控制原理就是依靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,因此伺服电机对工业机器人的精准度有很重要的影响。
伺服电机控制电路图一:
这是带有脉冲发生器的伺服电机控制器的简单基本设计。它使用处于不稳定模式的CMOS IC 7555生成脉冲来驱动伺服电机。可以适当地修改电路以获得足够长的脉冲。
伺服是具有输出轴的小型设备。通过向伺服发送编码信号,可以将该轴定位到特定的角度位置。只要输入线上存在编码信号,伺服系统将保持轴的角位置。轴的角位置由施加到控制线的脉冲的持续时间确定。这称为脉冲编码调制。
伺服器通常每20毫秒(.02秒)需要脉冲。脉冲的长度将决定电机旋转多远。通常,1.5毫秒脉冲将使电动机旋转到90度位置。这称为中立位置。如果脉冲时间短于1.5毫秒,则电动机会将轴旋转至接近0度。如果脉冲长于1.5ms,则轴将更接近180度。
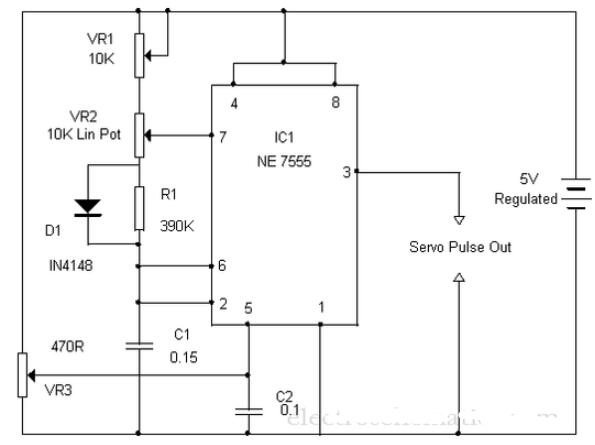
该电路设计为向伺服提供控制信号。IC1设计为非稳定多谐振荡器,可以为伺服操作提供脉冲。10KPot VR2,R1和电容器C1确定脉冲的高电平和低电平时间。由于VR2是可变的,因此高电平时间从2.07 mS到1.03 mS不等。低电平时间为40.5毫秒。通过调整VR1,很容易获得准确的时序.VR3调整IC1的控制引脚5的1.6伏控制电压。
伺服电机控制电路图二:
伺服电机是一种传统的电机。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。伺服电机的应用甚广,几乎所有的自动控制系统都需要用到。在家电产品中,例如录相机、激光唱机等都是不可缺少的重要组成部分。
下图是一伺服电机的最简单的应用。电位器RV1由伺服电机带动。电机可选用电流不超过700mA,电压为12~24V的任一种伺服电机。图中RV1和RV2是接成惠斯登(Wheatstone)电桥。集成电路LM378是双路4瓦功率放大器,也以桥接方式构成电机驱动差分放大器。
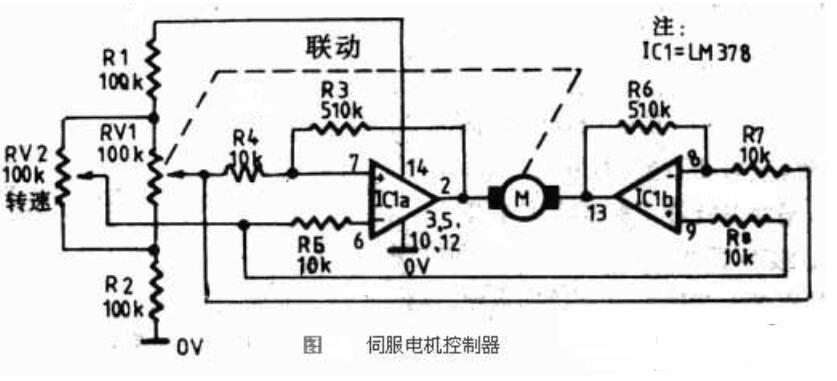
当RV2的任意变化,都将破坏电桥的平衡,使RV1—RV2之间产生一差分电压,并且加以放大后送至电机。电机将转动,拖动电位器RV1到新的位置,使电桥重新达到新的平衡。所以说,RV1是跟踪了RV2的运动。
-
电机的基本控制电路图2012-08-20 7908
-
伺服机构自动搜索及控制电路图2009-07-02 775
-
电机正反转控制电路图2009-05-08 9803
-
速印机电机控制电路图2009-05-06 1340
-
伺服电机转速控制电路2009-04-26 5212
-
互补步进电机控制电路图2009-04-09 1087
-
双速电机控制电路图2009-04-06 14894
-
并绕电机的转向和速度控制电路图2009-04-03 874
-
串激电机的转向和转速控制电路图2007-12-11 9479
全部0条评论

快来发表一下你的评论吧 !
