

受海葵影响的机器人抓取器更简单灵巧
电子说
1.4w人已加入
描述
据外媒报道,海葵本质上是一种软体动物,它能吞噬各种猎物。针对这种海洋动物,中国科学家现在将这一概念以机器人抓取器的形式进行了复制,并且这种抓握器可能会比常规机械手指模式操作起来更简单、也更灵巧。据悉,该原型设备由西南科技大学和清华大学的研究人员开发。
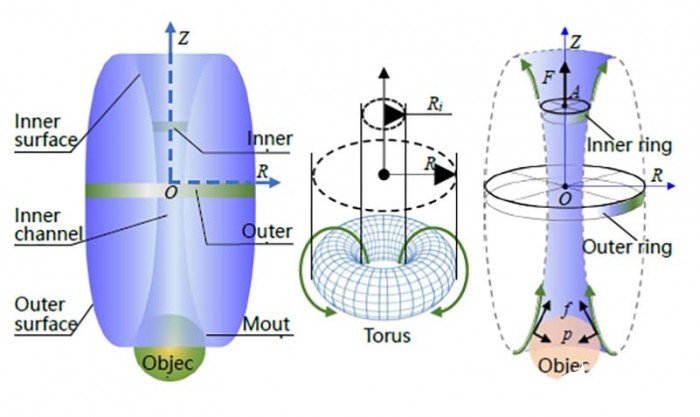
这种被称为仿生环的设备大部分为液体填充的圆柱形橡胶气囊。从本质上来看,它就像一个厚厚的垂直方向的套筒,有向内和向外的外皮,液体则被在这些皮层之间的空间里--由环面形成的圆柱体的内部在两端都是敞口的,而没有填充液体。
也就是说,环被连接到环面的内部皮肤上。当环面的敞口底部被放置在一个物体周围时,一个连接到环上的杆被用来向上拉动它。这样环就会把内部的皮肤向上拉从而让环面底部的外部皮肤向内滚动。此时,皮肤就会起皱、变胖并温柔地从四面抓住物体。
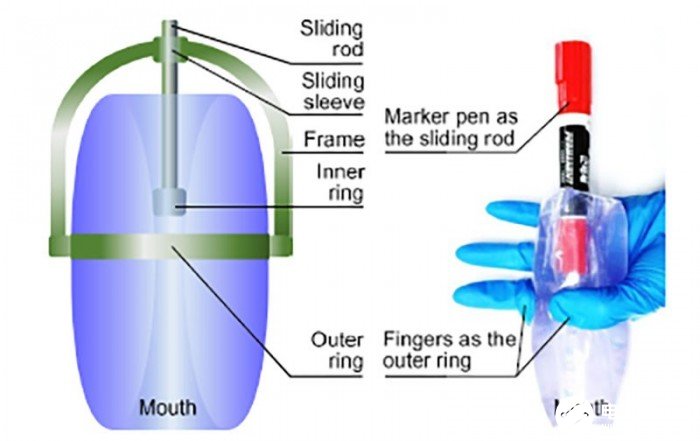
仿生环面原型(右侧)以及计划生产的模型示意图
这样的过程可以一直继续到物体被完全“吞噬”之后。当物体被释放时,内环会向下推从而让皮肤回滚。
根据科学家们的说法,这种设备的量产版应该会更便宜、更容易制造且应该能抓取各种尺寸、形状、重量和材料的物品。
另外,它还将可能在狭窄的空间或高压的海底环境下工作良好,在那里传统抓握器的使用可能会受到阻碍。此外,它甚至还有可能制造出纳米级的环面,从而能够抓住并释放单个细胞。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?2026-03-27 694
-
复合机器人抓取精度的影响因素及提升策略2025-04-12 1384
-
基于视觉的自主导航移动抓取机器人搭建方案2023-12-19 1945
-
基于视觉的机器人抓取系统设计2023-08-19 3299
-
如何让机器人的手变得“真正”灵巧2023-05-23 1990
-
基于视觉的机器人抓取系统2022-05-07 3928
-
四足机器人的机构设计2021-09-15 2147
-
【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站2019-09-18 2114
-
机器人抓取技术原理分析2017-09-20 2224
-
工业机器人应用广泛2017-09-07 3770
-
机器人与CCD2017-08-18 3824
-
为什么人形机器人更讨人喜欢?2016-05-12 5340
-
智能机器人灵巧手的研究2015-12-25 832
-
机器人灵巧手抓持分类器的设计与实现2015-12-23 784
全部0条评论

快来发表一下你的评论吧 !
