

机器人微型电机的选择 需要考虑以下几方面的要素
机器人
描述
在机器人行业中微型电机应用非常多,如机器人手指关节是通过舵机连接微型电机来进行各种动作。机器人常用的几种微型电机有有刷直流电机、无刷直流电机、永磁同步电机及步进电机,在常见的机器人产品中,有刷直流电机应用也是比较多的,下面我们来了解下机器人微型电机的选择要素。
一、微型电机的选择要求
现在市场上有非常多型号的微型直流电机,生产厂家更是多不胜数,所以在微型电机的选择过程中性能参数是重点考虑因素,微型电机具有多条运行特性曲线,从机器人产品的角度来看,我们主要考虑工作电压、转速、转矩、电流、物理参数及其他部件参数
1.工作电压:微型电机会存在多个电压参数,最常用的为额定电压,有的微型电机可以在超过额定电压运行一段时间,但是不可以长时间运行,不然还是会发热烧毁;
2.转速:微型电机每分钟的旋转速度;
3.转矩:微型电机旋转时候的扭力;
4.电流:微型电机有额定电流、空载电流和堵转电流参数;
5.物理参数:微型电机的尺寸、轴尺寸等
6.其他参数:微型电机的减速箱参数等
行星减速电机
微型直流电机的供电方式是直流电,所以是可以用电池供电的,这也是直流电机在机器人产品及各种电机产品上应用广泛的原因,微型电机一般为高速低转矩运转,但是机器人产品要求扭矩大,所以需要在微型电机输出轴之间增加减速器,也叫做齿轮组或减速机,通过减速器可以增加扭力降低转速,即转速越低,扭矩就越大,目前的机器人微型电机在生产时厂家都会带减速机,不需要自己再去装配,只要把转速和扭矩参数给到微型电机生产厂家即可。
微型减速电机输出转矩高、使用简单、选择范围大,但是精度较低,所以在机器人应用中,需要引入转速闭环控制,而不可使用开环控制。
二、机器人产品微型减速电机选择考虑因素
1.通用性:微型电机的通用性越强,价格就会越便宜;
2.工作电压:工作电压范围在6-20v;
3.输出转矩:如0.1-0.5Nm之间的输出转矩,可用在20-30kg的机器人产品;
4.转速:如机器人产品是通过轮子运动的,需要的转速较高,并需要可调速。
还有微型减速电机需要可以正反转,虽然现在的微型电机都是可以正反转的,但是有一些电机只能单方向旋转,所以我们要注意这点参数。
另外,机器人的运行环境因素也对选择微型电机的选择也是一个重要考虑范围,如室外?室内?光滑地面?粗超地面?是否需要爬坡?等等,像扫地机器人是通过微型电机驱动轮胎来进行运动的,所以它的运动速度就取决于微型电机的转速与轮胎的直径了。而微型电机的旋转速度取决于输入的电压和负载转几乎,在相同的供电电压下,靠在转速一家是高于负载转速的,所以微型电机出力越大,它的转速就会越低,电流也就越大,当输出力增大到一定程度的时候,微型电机就会定制旋转了,这个也就会我们参数中的堵转,当微型电机电流最大时,如果电机长时间堵转将会引起电机温度上升,严重时会造成电机损坏。
下面为机器人轮胎速度与微型电机旋转速度关系
V=0.02*pi*w*R/60;
其中:V为机器人运行速度(m/s);
w为经过减速器后电机旋转速度(rpm);R为电机半径(cm);
假设我们要求机器人运行平均速度为Vavg,那么要求减速电机转速为:
w=60*Vavg/(0.02*pi*R)
三、微型电机转矩要求
如果是机器人运行地面有摩擦及爬坡,那么转矩的要求就不一样,假设机器人运行地面摩擦因数为C,机器人质量为m(kg),此时机器人在地面匀速运行要求转矩为:
T=0.01Ff*R=0.01C*mg*R;
其中Ff为摩擦力(N),R为轮胎半径(cm);
在匀速运动之外,可能我们还会规定机器人的最大爬坡角度theta以及要求的最大加速度a等,此时,可以将两者等效为摩擦,此时:
C=C0+sin(theta)+a/g;
其中,C0为固有的地面摩擦系数,theta为最大爬坡解读,a为最大加速度,g为重力加速度;
T=0.01CmgR;
上述1式和2式即为机器人电机转速和转矩选择方法。
四、微型电机的运行条件
当微型电机在开始供电时,微型电机的轴还没开始旋转,这个时候电机是处于堵转状态的,微型电机电流最大为iS,所产生的转矩也最大,所以微型电机开始旋转,随着电机的转速上升,因微型电机反电势增大,微型电机电流下降、转矩下降电机转矩与负载转矩相等时,电机达到平衡状态,即为平衡状态电机转速。
在机器人中,负载转矩主要包括摩擦、爬坡、加速等因素,在多人还是比较关心微型电机在不同负载条件下所能达到的最高转速。比如在空载条件下微型电机能达到的最大转速,空载转速为w0;在负载条件下,微型电机堵转时所能产生的转速为最大转矩,堵转转矩为Ts,在其他条件下,微型电机运行在两者之间的线性连线上,如果负载为T,那么此时,微型电机的最高转速为w=w0×(1-T÷Ts)
假如微型电机最高转速为w,那么微型电机所能产生的最大转矩为T=Ts×(1=w÷w0)
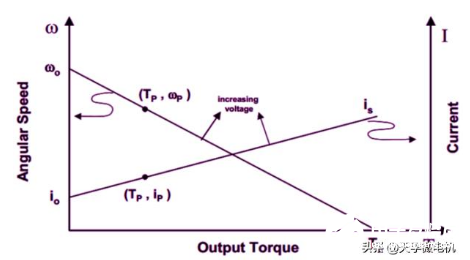
微型电机性能曲线图
上图为微型电机的最大转速与最大转矩、转矩与电流之间的线性关系
微型电机空载最高转速为w0,空载电流为i0,随着负载转矩的增大,微型电机的转速便线性下降,电流增大,直到负载转矩达到最大转矩,微型电机堵转,在微型电机转矩为T时,电机的电流为i=i0+(is-i0)×T÷Ts
其中i0为空载电流,is为堵转电流,Ts为堵转转矩
所以在选择机器人微型电机时我们需要考虑微型电机的运行电压、空载转速、一定转矩下的转速、一定转矩下的电流这电流表因素
1. 微型电机的运行电压:前现我们讲过大部分机器人产品微型电机的运行电压在6~24V,对于小型机器人来说一般使用的是镍氢电池,电压在3.6~48不等,对于12V的微型电机一般使用7.2V或者9.6V供电;
2. 微型电机的转速:一般选择在额定电压和额定转矩下所能满足条件的微型电机转速,假如是轮胎尺寸为5-20cm的机器人来说,微型电机的转速40-300rpm就足够了;
3.微型电机的转矩:对于微型电机的转矩我们一般计算的基础上留有50%的裕量;另外,如果电机数量多于一个,一般可以对电机转矩要求除以相应的数量。
4.微型电机的电流:微型电机的电流决定着机器人的运行时间,一般是根据微型电机的电流数据就可以大概评估其应用范围,如0.01A的微型电机,就适合于大多数机器人人产品;
还有一个尺寸问题,设计机器人产品时要确保微型电机能够安装
-
Neway电机方案在机器人技术方面的优势2026-03-30 1259
-
机器人舵机:关键要素解析与选择指南2024-06-06 2229
-
浅谈儿童陪护机器人2023-05-11 1180
-
机器人关节用什么电机?2021-05-27 4277
-
选择微型机器人电机时需要考虑的事项有哪些2021-01-25 2973
-
选择微型机器人电机需要考虑什么2021-01-22 1133
-
微型机器人关节使用超声波电机的优势2020-11-02 2821
-
AI行业发展是否成熟 需要考虑以下几方面的建议2020-03-18 1062
-
【设计技巧】不会选电机,还做什么机器人2019-08-10 2329
-
选择机器人电机的几点思考2019-03-12 4243
-
如何选择机器人电机2018-10-19 2728
-
直角坐标机器人如何选型2017-08-16 4995
-
机器人电机选择2016-03-15 9876
-
未来社会为何更需要搬运机器人2015-12-23 6778
全部0条评论

快来发表一下你的评论吧 !
