

通过CPLD器件实现雷达接收机的自动增益控制电路的设计
可编程逻辑
描述
1、 概 述
雷达观测的目标有大、有小,有远、有近,因此反射信号的强弱程度可能变化很大。当大目标处于近距离时,其反射信号很强,就会使接收机发生过载现象,破坏接收机的正常工作。为了防止强信号使接收机过载,需要对接收机的增益进行调节;在跟踪雷达中,为了保证对目标的自动方向跟踪,要求接收机输出的角误差信号的强度只与目标偏离天线轴线的夹角D(称为误差角)有关,而与目标的远近、反射面积的大小等因素无关(即误差信号实现归一化),因此采用自动增益控制电路(AGC)。
数字增益控制电路的原理图示如图1所示,其中IF是中频输入信号,Lo是相干信号。
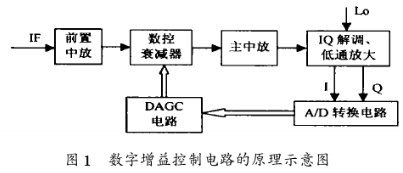
对于单脉冲跟踪雷达而言,图1是和支路的电路框图,他是一个闭环系统,为了保证2个差支路输出的角误差信号与目标的远近无关,和路产生的AGC控制码必须同时对2个差路进行增益控制,为了补偿和差三路的数控衰减器的不一致性,通常利用ROM来修正差路的控制特性曲线,以和路AGC控制码为地址,ROM内的数据是和路AGC控制码所对应的差路AGC控制码。
2、 用CPLD器件实现DAGC运算
由ALTERA公司所推出的复杂可编程逻辑器件(CPLD)有各种系列的产品。其中EPFl0K系列集成度达到了上万门,并含有较大容量的内部存储器,可以在单个器件内集成大量的功能单元,实现复杂的逻辑电路。
VerilogHDL是在应用最为广泛的C语言基础上发展起来的一种硬件描述语言,VerilogHDL提供了非常精简和易读的语法,相比较而言,VHDL的描述长度是VerilogHDI。的2倍。设计者只要学会Verilog一门语言,就可以应付逻辑设计中所有方面的事情。
IQ解调放大后的零中频模拟信号经A/D转换电路变成数字信号至DAGC电路,DAGC电路采用单片CPLD器件(EPFl0K100EQC240-1),器件内部的运算全部采用VerilogHDL语言编程实现,子程序包括:求模运算、门限、积分器及时序电路。DAGC电路的内部逻辑图如图2所示。 求模运算相当于传统模拟AGC电路中的峰值检波器,通常有2种方法可实现求模运算:一种是查表法;另一种是采用经验公式来计算。为了简化程序,这里介绍经验公式的算法:
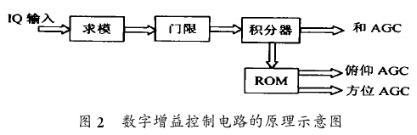
模值=“二选大”+0.416ד二选小”
先对I路信号和Q路信号分别取绝对值,用比较器判断二者的大小,取其中大的值给“二选大”,小的值给“二选小”,在程序中调用一次乘法器,和一次加法器即可计算出信号的模值。
为保证接收机的灵敏度,采用带门限的AGC电路(又称延迟式AGC电路),对输入信号与门限值之比取对数,即为输入信号与门限的误差,对数运算可利用CPLD器件的片内ROM用查表法实现。
积分器的功能是记忆前一采样周期的AGC控制码,并根据本次采样周期计算的误差值对其进行调整,最终使接收机的视频输出幅度稳定在门限电平附近,幅度起伏小于1dB。
3、 数控衰减器在中频电路中引入的冲击振荡问题
由于AGC控制码的开关作用会在数控衰减器的输出端产生冲击振荡,这种冲击振荡是不可消除的,他会对中频信号造成干扰,成为假目标,破坏接收机的正常工作。采取以下措施可将这种冲击振荡对接收机的影响降至最小。
(1)合理设计时序电路
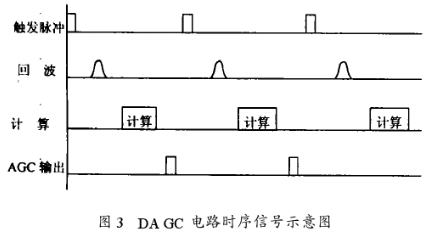
数控衰减器产生的冲击振荡虽然不能彻底消除,但如果把AGC控制码的变化控制在雷达的休止期内,就会避免冲击振荡干扰中频信号。时序电路用以产生所有功能模块所需的同步信号,时序信号的波形图如图3所示。
(2)数控衰减器的延迟时间必须尽可能小,具体数值主要取决于雷达休止期的时间。
4、 数控衰减器的实现
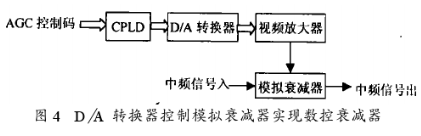
数控衰减器的实现方法有2种:一种是用开关选I通电组网络实现,其缺点是小衰减量位电路是失配的,I驻波比较大,高衰减量位的精度不易保证,组合起来I积累误差较大。另一种是使用D/A转换器输出控制模拟衰减器实现数控衰减器,控制精度容易保证,功能图如图4所示。 模拟衰减器控制的线性度一般比较差,AGC控制码通常是8b,直接用这8b数据输入给D/A转换器去控制模拟衰减器,其控制精度是不能满足接收机的指标要求的,图4中的CPLD器件实际上是实现了EPROM的功能,EPROM的地址是AGC控制码,其数据输出可以选择12b,选用12b的D/A转换器输出控制模拟衰减器,控制精度可达到0.5dB。如果这部分电路放在中放盒里,CPLD器件可选择EPM7128SLC84-6,虽然该器件没有片内存储器,但用VerilogHDL语言编程很容易实~EPROM的功能,单片EPMTl28器件可替代4个8b的EPROM器件,实现电路的小型化。
5 、结 语
增益控制电路是雷达接收机的重要辅助电路,早期的雷达采用模拟AGC电路,不便于调试,后来采用EPROM和D/A转换器对模拟衰减器的控制曲线加以修正,使接收机易于调试,但电路集成度低,设备量大。本文中介绍的数字增益控制电路用单片CPLD器件实现,电路参数调整灵活快捷,同时也实现了电路板的小型化。
责任编辑:gt
-
自动增益控制在康佳彩色电视接收机中的应用2023-10-19 650
-
超外差收音机能修改自动增益控制电路吗?2020-05-29 3315
-
自动增益控制电路有哪些应用?有什么优势?2019-09-04 6648
-
请问下自动增益控制电路的问题2019-04-03 3613
-
一款应用于UHFRFID阅读器接收机的自动增益控制电路2017-01-03 1093
-
低频接收机自动增益控制电路的分析与设计2012-02-08 1390
-
彩色电视接收机自动增益控制(AGC)电路应用分析2010-04-24 2496
-
彩色电视接收机自动增益控制(AGC)电路分析2010-04-20 4485
-
彩色电视接收机自动增益控制AGC电路应用分析2010-02-10 1727
-
自动增益控制的原理2009-07-28 9292
-
自动增益控制电路图2009-06-30 2968
-
自动增益控制技术应用?2009-05-10 5115
-
低失真的自动增益控制电路2009-03-20 1147
-
什么是自动增益控制2008-12-29 3605
全部0条评论

快来发表一下你的评论吧 !
