

基于AGV小车的全局地图AGV导航方案设计
电子说
描述
随着工业4.0时代的到来,AGV机器人作为智能物流体系中的重要设备之一,以其降低物流成本,提升物流效率等优势,在物流市场上占据着越来越重要的地位。
AGV的应用正突破传统的仓储、机械制造行业,在港口、机场等行业也有一定的需求。
AGV设备需考虑导航、安全防护、货物识别、运动控制等要素,本次小编要介绍的是AGV小车的导航方案。
实现AGV导航的方法大致可分为基于全局地图(如激光扫描,二维码读取)和基于路线引导(如磁导航,荧光导航)两种。接下来将针对这两种方法分别提供Sick产品的对应方案。
基于全局地图的AGV导航
优点:路径自由,可灵活编程
1.激光导航
通过反光板:通过测量预先布设的地标(反光板)来确定当前位置和方向
SICK 首选产品: NAV310/350
通过轮廓扫描:通过扫描四周的轮廓特征,确定当前位置和方向
SICK 首选产品:LMS111
2.二维码坐标导航
通过读取网格状分布的二维码,确定坐标方位
SICK首选产品:Inspector P30 / PI50
基于线路引导的AGV导航
优势:性价比高,调试简单
1.磁条导航
通过读取预先布设的磁条,通过磁感应信号,检测磁条与传感器中心点相对距离,是小车沿既定方向行驶
2.荧光色带导航
通过读取预先布设的色带,通过检测色带中心位置,使小车沿既定方向行驶
此类线路引导方式的导航,极少厂家提供传感器方案,为补充并丰富化AGV导航解决方案,SICK在2018年推出了 磁导航传感器MLS 和 荧光导航传感器OLS!
实现AGV小车自主驾驶“路线导航”应用
说得那么厉害,我们家自己买一些磁性开关或荧光开关也能实现啊~
下面这些功能,你们家组装的能实现吗?
磁导航传感器MLS系列
✔支持磁块标记识别,获取转弯/停止等命令
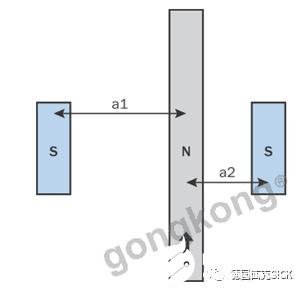
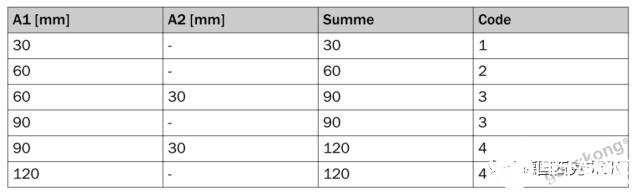
通过磁块标记距离导航磁条中心的距离来表现不同的代码,如下表
✔MLS 可兼容
⚫ 无论单面N 或单面S
⚫ 无需限定磁条宽度及磁性强弱
✔支持识别3组导轨
✔MLS 提供简易操作界面
⚫ 实时查看状态及代码输出
⚫ 实时查看磁场强度
⚫ 传感器参数设置
✔支持分辨率:1mm;重复精度1mm
✔感应范围200mm~600mm可选
✔支持CANopen
荧光导航传感器OLS系列
✔可通过阅读条形码,简化小车控制
⚫ 传输位置信息
⚫ 获取驱动指令
该条码须用荧光颜料打印
✔支持识别三组荧光色带
✔智能补偿
⚫ 补偿缺失/损坏的色带
⚫ 补偿被弄脏的色带
最多可补偿色带宽度的50%
✔支持180mm视野
✔极强的抗干扰能力(不受环境光/其他颜色干扰)
✔支持CANopen和TCP
责任编辑;zl
-
AGV小车的工作原理是什么?2024-12-19 2257
-
方案|飞凌FETMX8MP-C核心板在AGV小车的应用2022-01-08 4153
-
方案|嵌入式核心板在AGV小车上的应用2021-09-30 1810
-
关于磁导航agv小车,它是由哪些结构组成的2020-09-03 2315
-
RFID在AGV小车上的应用以及AGV小车系统的功能2020-08-12 2179
-
AGV小车的充电方式2020-06-28 2612
-
基于全局地图的AGV小车导航设计方案2019-10-04 4357
-
AGV激光雷达SLAM定位导航技术2018-11-09 9864
-
AGV小车上使用无线开关量2018-09-11 4016
-
AGV小车上的无线应用2018-09-05 2294
-
车间中的AGV搬运小车放料取料案例2018-06-21 3358
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8141
-
自主导航小车AGV定位方法的研究[1]2016-08-29 8475
-
AGV系统构成2015-12-22 6686
全部0条评论

快来发表一下你的评论吧 !
