

腾讯无人驾驶车道选择方法专利解密
电子说
描述
腾讯的该项技术中主要利用无人驾驶车辆能够采集到的各种信息以及决策系统的决策来完成车道的选择,而车道的选择对于无人驾驶汽车来说是至关重要的一个环节。
集微网消息,在车辆行驶过程中,驾驶员会选择最合理的车道进行行驶,而在无人驾驶场景中,车辆在自动驾驶时必须具备和驾驶员一样的自主选择最优车道的能力,才能在多车道的高速公路或者城市道路.上行驶,否则将无法上路。
用户自主驾驶的过程中,可以根据经验对自动导航的路线预估后可以加入用户自己的判断,因此可以允许有很长的响应时间,而无人驾驶是全自动,不允许有过长的响应时间,需要确保响应时间尽可能低。
在无人驾驶场景中,选择最优车道会涉及到变换车道的变道行为,包括自由变道(DLC)和强制变道(MLC)两种:DLC是为了改善行驶速度;MLC是由于路口等影响必须得离开本车道。现有的无人驾驶技术中,需要先判断是否需要考虑MLC,在符合一定条件后再考虑DLC,以便通过这种判断机制对驾驶员的驾驶行为进行仿真模拟。
然而,这种判断机制的问题是:将DLC和MLC割裂的进行分析的判断机制,与无人驾驶的场景,尤其是变道的选择上存在较大差异。因此,基于该判断机制的决策结果在实际应用中并不理想,无法实现精准的变道选择,从而也无法确保响应时间尽可能低的要求。
为了解决这个问题,腾讯科技在18年3月29日申请了一项名为“一种车道选择方法即目标车辆、计算机存储介质”的发明专利(国际公布号:WO 2018/192352 A1),申请人为腾讯科技(深圳)有限公司。
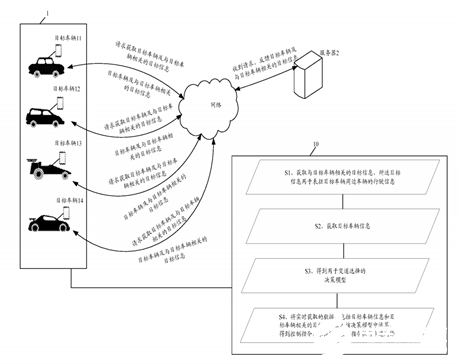
如上图,无人驾驶车辆的各种硬件进行信息交互的示意图,其中主要包括无人驾驶车辆1以及服务器2。
首先我们需要明确自动驾驶和无人驾驶的区别,用户自主驾驶的过程中,是半自动,对自动导航的路线预估后可以加入用户自己的判断,因此,可以允许有很长的响应时间;而无人驾驶是全自动,不允许有过长的响应时间,需要确保响应时间尽可能低。
该专利发明的系统中,对于该问题的解决依赖于系统的处理逻辑,首先获取与无人驾驶车辆相关的信息,这些信息用于表征无人驾驶车辆周边车辆的行驶信息,其次要获取无人驾驶车辆的信息,包括车身的信息以及周围的环境信息,接着根据用于决策路口变道的第一模型和用于决策行驶速度的第二模型得到用于变道选择的决策模型,最后再根据这些实时获取的数据得到控制指令进行车道的选择。
具体的该系统的流程如下图所示。
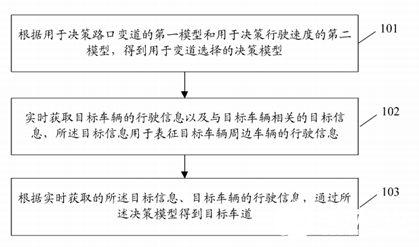
该系统用于检测变道的具体过程需要依赖两个决策模型,即根据用于决策路口变道的第一模型和用于决策行驶速度的第二模型,得到用于变道选择的决策模型。
第一模型为MLC,用于评估当前车辆行驶到路口需要的时间t,是否大于变换车道所需要的时间,采用MLC,是对路口变道进行决策,比如当前由于路口等影响必须得离开本车道。
第二模型为DLC, DLC的决策分为车道选择(LS)和确定变道的接纳(GA)两步。其中,在LS中,是根据车速、车道限速等综合信息判定相邻车道是否需要变道;而GA中,是根据相邻车道前后车的距离来判断,是否拥有总够的变道空间。只有这2个条件同时满足,才会做出变道决策。
无人车辆的周边行驶信息由102确定,这些信息包括周边车辆的地理位置信息以及周围车辆相对于自身的距离,还有这些车辆的速度、所在车道信息,这些信息就需要安装在无人驾驶车辆上的各种传感器来获取。
最终以上技术,利用决策模型做出是否需要变道的决策。以上就是腾讯科技发明的控制无人驾驶车辆自主选择车道的专利,可以看到该技术中主要依赖于决策系统,利用无人驾驶车辆能够采集到的各种信息以及决策系统的决策来完成车道的选择,而车道的选择对于无人驾驶汽车来说是至关重要的一个环节。
-
介绍无人驾驶硬件平台设计2021-09-09 2860
-
无人驾驶汽车的工作原理是什么?2021-06-28 5715
-
无人驾驶分级及关键技术2021-01-21 3288
-
无人驾驶的未来正在改变2018-08-30 3128
-
无人驾驶硬件之传感器平台2017-09-30 3582
-
无人驾驶与自动驾驶的差别性2017-09-28 6584
-
无人驾驶电子与安全2017-02-22 4914
-
福特CEO曾扬言无人驾驶将会在2020年实现商用,你们同意吗?2017-02-07 5083
-
亚马逊新专利:让无人驾驶汽车在可逆车道上行驶2017-01-18 782
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 10444
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 3124
-
百度无人驾驶车北京完成路测2015-12-12 2814
-
无人驾驶导航平台2014-11-11 9714
全部0条评论

快来发表一下你的评论吧 !
