

通过单片机来设计自由摆的平板控制系统
电子说
描述
(文章来源:电气新科技)
本文采用角度传感器,运算放大器,AD转换器采集平板变化信息,通过单片机,产生脉冲信号,控制电机模块驱动步进电机带动平板转动,摆杆角度越大步进电机转过的角度越大,从而控制平板状态基本保持水平,实现自由摆得平板控制。
自由摆的平板系统基本组成原理,根据自由摆的平板控制系统的设计要求,电机控制平板,当摆杆移动时要保持平板的平衡,因此需要采用传感器获得摆杆移动的角度值,再通过电机控制平板旋转相应的角度,从而保持平板的水平位置。其基本组成框图原理如下:
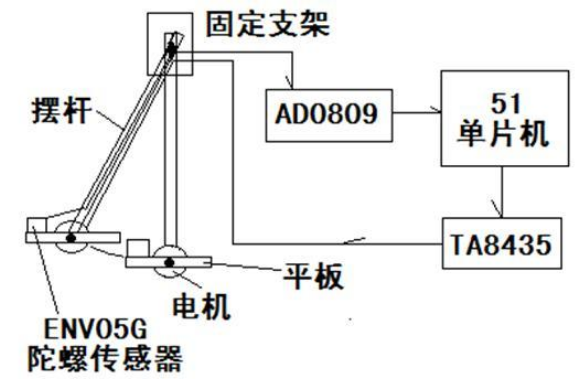
采用日本村田公司的ENV05G陀螺传感器,安装于平板,以获得平板的位置和姿态信息。当摆杆移动时,平板的水平位置会发生变化,此信号通过调理电路输入到AD0809转换器,单片机获得摆杆的变化信息,控制TA8435芯片,使摆杆上的电机也作相应的旋转,及时调整平板变化位置,从而使平板基本保持水平的位置。
硬件电路设计包括:传感器与信号采集电路,单片机控制电机电路。传感器采用日本村田公司的ENV05G陀螺传感器,通过检测,测量角度,实现运动物体的位置控制和姿态控制,它具备高可靠性,高精度,快响应,低噪音特点。
其输出到传感器外围调理电路,是一个由LM324运放组成的二阶压控源RC低通滤波器,信号从同相端输入,具有较高的输入阻抗,放大器的增益为:Auf=1+Rf/R1=1+33k/56k=1.589。输出信号首先经R1,R3分压,分压比为:56/(33+56)=0.629调理电路放大倍数为:0.629*1.589=1,传感器信号调理电路输出即为角度传感器能够输出的角度范围值。设计中将角度传感器放在摆杆上,从静止开始来回旋转,即可得到摆杆的实时角速度值,再通过软件处理输出角度值。
由于陀螺仪传感器输出为模拟信号,处理器单片机要想使用其提供的信息,必须进行A/D转换,把模拟信号转变为数字信号,从而实时得到角速度值。将运算放大器Vout输入给0809的IN0,将电压模拟信号转变为与之对应相等的数字信号,输入给单片机进行数据处理。OE端为高电平时,才可以从三态输出锁存器取走转换完的数据。
AD0809的数据输出公式为:Vout=Vin*255/5=Vin*51,其中Vin为输入模拟电压,Vout为输出数据。ALE为地址锁存允许输入线,高电平有效。CLK为时钟输入信号线。ADC0809内部无时钟电路,本设计中用单片机给ADC0809提供时钟信号,减少硬件电路。将A/D转换输出OUT口与单片机P2口相连,单片机接收的输入数字角速度量。
电机选择42BYGHW208型步进电机,此电机是两相四线制,体型较小,力矩可以满足要求。步进电机整步工作情况下,距角为1.8°,所以一个脉冲使电机转动1.8°。单片机电路,AD换后的数字信号交由单片机处理。由θ传=θ电机 ,通过控制步进电机输入脉冲频率控制其转动的角度,即可以基本实现要求,使平板在摆杆一个周期内转一圈,五个周期转五圈,也可以保持电机角度与摆杆角度相等,以此实现基本要求,使平板保持水平,实现硬币不能掉下的任务。
使平板随着摆杆的摆动而旋转:预计摆杆摆动一个周期所需的时间t,以此作为平板旋转一周的时间,则电机的角速度为360/t deg/s,因为电机步进角为1.8度,故所需脉冲频率360/(t*1.8)。以此计算出定时器的中断次数N,即可控制平板随着摆杆的摆动而旋转,摆杆摆一个周期,平板旋转一周。
使平板保持水平:开始——传感器电压增加——单片机控制电机左转,根据传感器输出电压幅值大小确定定时器定时时间,从而确定频率,从而控制步进电机的转速。用手推摆杆至50度,激光笔照射程序:推动摆杆至某一固定位置,由三角形角度关系及正余弦定理确定电机所需旋转角度,从而确定电机所需脉冲数目。由单片机产生100HZ的定时中断,由程序设置中断的数目,从而控制步进电机转过的角度。
(责任编辑:fqj)
-
单片机控制系统课程设计《基于单片机的大棚智能灌溉控制系统》2022-03-07 2057
-
单片机在倒立摆控制系统的应用2022-02-10 783
-
基于单片机恒温控制系统程序和仿真设计2021-07-22 2455
-
自由摆平板控制系统设计2017-11-10 732
-
基于单片机的温室控制系统2016-05-10 1268
-
基于自由摆的平板控制系统2016-04-28 939
-
基于单片机的水位控制系统设计2016-03-01 2109
-
基于自由摆的平板控制系统怎么实现呢2015-08-02 8431
-
风力驱动的自由摆控制系统2014-03-22 8419
-
谁做过基于自由摆的平板控制系统!!!2013-07-23 3989
-
有谁做过基于自由摆的平板控制系统、交流交流、2013-05-14 1778
-
2011全国大学生电子设计竞赛B题基于自由摆的平板控制系统2011-09-01 3797
-
单片机温度控制系统2010-09-25 1005
-
基于SPCE061A单片机的二级倒立摆控制系统2009-08-04 591
全部0条评论

快来发表一下你的评论吧 !
