

基于信号识别和到达时间差定位无人机控制源的方法
军用/航空电子
描述
中国无人机发展概况
从2014年起,全球无人机行业经历了井喷式的发展,中国无人机领跑世界。另一方面,无人机行业与市场面临着监管的难题,空中愈来愈多的无人机,引发了人们对无人机使用安全事故和社会治安等风险问题的担忧,也引起了国家监管层与社会各界的极大关注。截止目前,国内已经多次出现无人机干扰民航起降,以及在重大活动中未经审批私自遥控飞行等行为。
无线电管理局主要负责无人驾驶航空器系统频率资源的规划指配及非航空频段无线电发射设备监管等。工信部无管局已发布《关于无人驾驶航空器系统频率使用事宜的通知》,各级无线电管理工作者也在探索使用无线电监测、定位、干扰、压制等技术手段来管理和规范无人机的合规使用,促进产业健康发展。
是德科技定位无人机控制源的研究
在无人机管控的技术手段中,快速识别和定位无人机控制信号发射源是一种有效的方式。目前民用无人机大多在视距内飞行,空旷区域最大控制距离为2千米到5千米,城市环境控制距离更短,有利于技术手段快速定位。大多数民用无人机工作在2.4GHz和5.8GHz非授权频段,在这些频段无线局域网、工科医设备、无绳电话等各种无线电业务非常拥挤。如何在拥挤的无线电业务中快速识别隐藏的无人机控制信号,从而进行定位是主要的技术难点。由于频谱重叠和功率限值相同,传统的最大场强定位、侧向交叉定位等方法都很难识别和定位无人机控制信号。
本文讨论基于信号识别和到达时间差(TDOA, Time Difference of Arrival)定位无人机控制源的方法,介绍了定位距离的仿真结果,以及系统整体安装配置。无人机控制源监测定位系统基于是德科技N6820ES信号监测定位软件和N6841A室外小型监测接收机。
1、无人机控制信号识别
对于工信部无管局规划的840.5MHz-845MHz、1430MHz-1444MHz和2408MHz-2440MHz无人驾驶航空器系统工作频段以及5.8GHz非授权频段,无人机监测定位系统支持分段扫描、信道扫描和信号识别归类,对于识别的无人机控制信号自动定位控制信号发射源。系统也可以添加对无人机视频回传信号的识别,进而定位无人机的位置。
N6820ES软件继承了安捷伦/是德科技传统“黑鸟”无线电监测系统的能量检测、信号识别、信号分类和通用信号检测(USD,Universal Signal Detection)功能。N6820ES成熟的能量检测算法可以准确快速的发现监测频段内所有感兴趣的信号。通用信号检测器(USD,Universal Signal Detector)允许用户通过自定义的条件来识别无人机控制信号。USD包含三个协同或独立工作的条件来识别无人机控制信号:
· 频率计划,包含监测频段、工作信道和独立频点等;
· 带宽滤波器;
· 宽带频谱特征检测器;
宽带频谱特征检测器是识别无人机控制信号的有效手段,实际测试中非常准确的区分了不同类型的设备。检测器算法包含频谱特征相关算法、峰值比较法和限值比较法。频谱特征相关算法如图1所示,宽带频谱特征检测器利用相关算法比较每段频谱的特征是否匹配,当频谱特征匹配两次以上时,触发系统执行告警、定位、调制识别、记录等任务。
图1、USD宽带频谱特征检测的无人机控制信号
USD功能支持将监测到的信号频谱记录为频谱特征条件、用户自定义频谱特征条件和文件导入频谱特征条件,保证系统对无人机信号的识别能力可以跟随技术和产品的发展不断更新。系统预定义的无人机控制设备和USD编辑界面如图2所示:
图2、预定义无人机控制信号及USD编辑界面
无人机控制信号常用跳频工作模式。N6820ES 和N6841A组成的监测定位系统具有精确的时间同步和信号回放分析功能,支持对此类信号的识别和定位。N6841A传感器网络采用GPS或IEEE-1588协议进行同步扫描。对于20MHz带宽的IQ数据,每个传感器内置缓存可以记录4.8秒。系统同步每个传感器接收的数据,对于识别到的跳频信号,直接定位或者调用传感器缓存的数据执行定位算法。图3为系统实际测试中分段扫描并识别的四款无人机控制信号:
图3、N6820ES分段扫描和识别归类四款无人机控制信号
2、监测和定位作用距离
无人机控制信号的定位使用N6841A小型室外监测接收机组成的TDOA网络实现。通常需要布置至少四台移动或可搬移监测站,站点间距离1~2公里。每个站点既可以执行常规信号监测任务,又可以执行TDOA定位。TDOA定位的具体步骤本文不做介绍,只对无人机控制信号发射源的定位距离进行分析。
无人机控制信号被识别和定位的距离受地形地貌、无人机监测站点天线的安装高度、无人机工作频段等多种因素影响。后续的仿真分析基于下面两个假设条件:
· 无人机控制器发射带宽2MHz,发射功率100mW(20dBm);
· 监测接收机天线安装高度5米。
监测和定位范围的仿真分为三种不同的地形地貌传输模型:城郊非视距传输(Suburban Non-Line of Sight),城郊视距传输(Suburban Line of Sight)和农村视距传输(Rural Line of Sight)。视距模型中假设地面无人机控制器在监测天线可视范围内,两者间没有明显的障碍物遮挡。非视距传输模型假设监测天线和无人机控制器之间有明显的障碍物阻挡信号传输。
基于Wireless World Initiative New Radio consortium (WINNER I and II)提供的传输模型,对工作在不同频段的无人机控制器,监测系统作用距离仿真结果如表1所示:
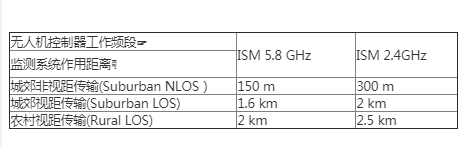
表1、无人机控制信号监测定位距离的仿真分析结果
是德科技提供了传感器布置和优化工具(SPOT,Sensor Planning and Optimization Tool)用于无人机控制源监测定位站点的布置。使用SPOT建模和仿真工具,可以为监测和保障的重点区域提供最佳覆盖。图4为SPOT工具仿真的单个无人机控制源监测定位站点覆盖范围。
图4、是德科技SPOT工具仿真的无人机控制源监测定位站点覆盖范围
3、无人机控制源监测定位系统配置
无人机控制源监测定位系统主要由N6820ES监测软件和N6841A小型室外监测接收机组成。N6820ES软件实现无线电监测信号的识别和定位结果输出,N6841A组成的室外站执行信号监测和定位。建议布置四台或四台以上室外监测站点用于信号监测和TDOA定位。每套室外监测站点的配置如图5所示:
- 5米的可伸缩天线杆;
- 是德科技N6850A宽带全向天线(WBOA),工作频率20MHz到6GHz;
- 低噪声放大器,电源,USB电池组和附件;
- 4米的N型室外射频电缆;
- N6841A监测接收机,频率范围20MHz到6GHz,带GPS天线,IP67防护,交流供电;
- 转运箱;
- 8小时工作锂电池和充电器;
- 50米室外带屏蔽网线;
图5、室外可搬移监测站点配置
4、总结
上文介绍了基于信号识别和TDOA定位对无人机控制信号进行监测定位的方法,在不同环境多次实验中验证了系统良好的工作效果。为了促进无人机产业的健康发展,引导用户合规高效的使用无人机开展业务,并且减少和降低其带来的各种风险,各级无线电工作者都在探索和钻研无人机管控的技术手段。通过本文的讨论,为大家提供一个无人机管控的新思路,与大家一起探索前行。
-
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域2024-03-12 4677
-
剖析三星七频无人机天线搭配差分GPS模块精准定位定向2016-05-26 4096
-
无人机侦测和反制系统2017-04-05 8628
-
无人机射频干扰原理概论2017-05-26 4629
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7479
-
无人机无线电有哪些干扰2019-07-11 3214
-
航模/无人机遥控的解决方案2020-07-03 3481
-
无人机探测技术2020-07-29 2964
-
各类反无人机技术的优势2022-08-25 28013
-
无人机反制设备的原理是什么?2022-09-13 11766
-
知语云:低慢小无人机如何反制管制监测行为?方式方法又是什么?2023-11-20 4070
-
基于无人机的双像立体定位方法2017-11-10 948
-
基于改进双向测距到达时间差定位算法的超宽带定位系统2017-11-28 1296
-
无人机和无人机控制方法及无人机远程操控系统方法说明2018-12-06 3740
-
关于无人机自动识别、定位和压制系统的监测和对抗2019-10-16 3720
全部0条评论

快来发表一下你的评论吧 !
