

CAN总线位周期结构及两种位同步方式分析
接口/总线/驱动
描述
引言
CAN(Controller Area Network)是有效支持分布式实时控制的串行通讯网络。从位定时的同步方式考虑,它实质上属于异步通讯协议,每传输一帧,以帧起始位开始,而以帧结束及随后的间歇场结束。这就要求收/发双方从帧起始位开始必须保持帧内信息代码中的每一位严格的同步。从位定时编码考虑,它采用的是非归零编码方式,位流传输不像差分码那样可以直接用电平的变化来代表同步信号,因此为保证同步质量,CAN协议定义了自己的位同步方式:硬同步和重同步。
目前相关文献均缺乏对CAN总线位定时与同步机制的详细分析。本文深入分析了CAN总线位周期的结构以及CAN的两种位同步方式 (硬同步和重同步),并明确给出了重同步时重同步跳转宽度和相位差补偿的关系,对于指导位定时参数的设置有较好的参考价值。
2、位周期结构
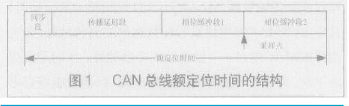
网络的标准位速率,其中就是额定位时间(也称标准位周期)。如图1所示,CAN总线的额定位时间是由4部分组成的:同步段(SYNC_SEG),传播段(PROP_SEG),相位缓冲段1(PSEG1)和相位缓冲段2(PSEG2)。所以额定的为时间 ,位周期中的这些段都是可以编程设置的,且都可以用整数个基本时间单位(时间份额)来表示。这个基本时间单位由振荡器分频而得的 ,(BRP为波特率预分频因子,也可以编程设置)。
同步段是CAN总线位周期中每一位的起始部分。不管是发送节点发送一位还是接收节点接收一位都是从同步段开始的。但是由于发送节点和接收节点之间存在网络传输延迟以及物理接口延迟,发送节点发送一位之后,接收节点延迟一段时间才能接收到,因此,发送节点和接收节点对应同一位的同步段起始时刻就有一定的时延,记为。
传播延时段的设置就是要补偿该段时延()的。CAN总线协议中的非破坏性仲裁机制以及帧内应答机制,都要求那些正在发送位流的发送节点能够同时接收来自其他发送节点的“显性位”(逻辑0),否则就会使得仲裁无效或者应答错误。传播延迟段推迟那些可能较早采样总线位流的节点的采样点,保证由各个发送节点发送的位流到达总线上的所有节点之后才开始采样。
重同步跳转宽度SJW并不是位周期里的一段,却是位定时计算时的一个重要的指标,它定义了重同步时为补偿相位误差位时间中相位缓冲段1或者相位缓冲段2被增长或缩短的最大基本时间单元数。
3、同步机制
CAN总线的位同步只有在节点检测到“隐性位”(逻辑1)到“显性位”(逻辑0)的跳变时才会产生,当跳变沿不位于位周期的同步段之内时将会产生相位误差。该相位误差就是跳变沿与同步段结束位置之间的距离。如果跳变沿发生在同步段之后采样点之前为正的相位误差;如果跳变沿位于同步段之前采样点之后为负的相位误差。相位误差源于节点的振荡器漂移,网络节点之间的传播延迟以及噪声干扰等。CAN协议规定了两种类型的同步:硬同步和重同步。
3.1硬同步
硬同步只在总线空闲时通过一个下降沿(帧起始)来完成,此时不管有没有相位误差,所有节点的位时间重新开始。强迫引起硬同步的跳变沿位于重新开始的位时间的同步段之内。
3.2重同步
在消息帧的随后位中,每当有从“隐性位”到“显性位”的跳变,并且该跳变落在了同步段之外,就会引起一次重同步。重同步机制可以根据跳变沿增长或者缩短位时间以调整采样点的位置,保证正确采样。
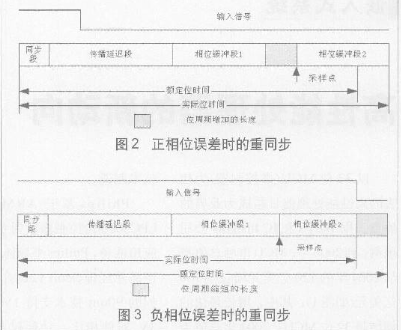
如图2,跳变沿落在了同步段之后采样点之前,为正的相位误差,接收器会认为这是一个慢速发送器发送的滞后边沿。此时节点为了匹配发送器的时间,会增长自己的相位缓冲段1(阴影部分)。增长的时间为相位差的绝对值,但是上限是重同步跳转宽度SJW。
如图3,跳变沿落在了采样点之后同步段之前,为负的相位误差,接收器把它解释为一个快速发送器发送的下一个位周期的提前边沿。同样节点为了匹配发送器的时间,会缩短自己的相位缓冲段2(阴影部分),下一个位时间立即开始。缩短的时间也为相位差的绝对值,上限是重同步跳转宽度SJW。
相位缓冲段只在当前位周期内被增长或者缩短,接下来的位周期,只要没有重同步,各段将恢复为位时间的编程预设值。
当相位差的绝对值小于或者等于重同步跳转宽度SJW时,重同步和硬同步的效果是相同的,能实现相位差的补偿;但是如果相位差的绝对值比重同步跳转宽度大,由于补偿的最大值是重同步跳转宽度,致使重同步不能完全补偿相位差。
CAN协议的位填充机制除实现仲裁场、控制场、数据场和CRC序列的数据的透明性外,还增加了从“隐性位”到“显性位”跳变的机会,也就是增多重同步的数量,提高同步质量。在没有出错影响的情况下,位填充原则保证了两次重同步跳转边沿之间不会多于10个位周期(即5个显性位,5个隐性位),而实际的系统会有错误发生,使得实际的两次重同步跳转边沿之间的间隔可能为17到23个位时间(活动错误标志及其叠加6到12个位时间,错误界定符8个位时间,间歇场3个位时间)。
4、结语
在实际的系统设计中,用户可以根据振荡器时钟频率,总线波特率以及总线的最大传输距离等因素,对CAN控制器的位定时参数进行优化设置,协调影响位定时设置的两个主要因素:振荡器容差和最大总线长度,合理安排位周期中采样点的位置和采样次数,保证总线上位流的有效同步的同时,优化系统的通讯性能,进一步推进CAN总线的广泛应用。
责任编辑:gt
-
【CAN总线知识】CAN总线信号传输的位定时与位同步理论2024-07-17 2992
-
CAN总线的位定时与同步机制#汽车CAN总线北汇信息POLELINK 2023-07-17
-
针对CAN总线传输距离问题的两种解决方案2012-08-16 2573
-
CAN总线中位定时的设定方法2012-10-11 3861
-
CAN总线信号传输的位定时与位同步理论2016-08-15 2626
-
AVR的两种位操作及比较2016-09-06 6746
-
CAN总线同步规则 CAN总线同步方式2018-12-18 4193
-
CAN协议中的位定时与位同步分别是什么?2021-05-18 1871
-
关于CAN总线位定时和同步机制的简要分析2021-05-28 2084
-
两种不同结构的永磁同步电机特点说明2021-06-28 2418
-
CAN 总线位定时参数的确定2009-05-15 557
-
详解CAN总线信号传输位定时与位同步2016-08-16 2523
-
CANOpen系列教程05_ CAN总线同步与位填充、优先级的决定2020-03-06 7379
-
CAN总线信号传输位定时与位同步是如何实现的2020-03-21 3128
-
高速CAN总线和低速CAN总线的特性2024-01-31 5075
全部0条评论

快来发表一下你的评论吧 !
