

红外自动干手器电路图原理
电子说
1.4w人已加入
描述
红外自动干手器电路原理,为便于维修剖析了该机电路,画出电路图(见附图)。并介绍常见故障原因及简单处理,供参考。
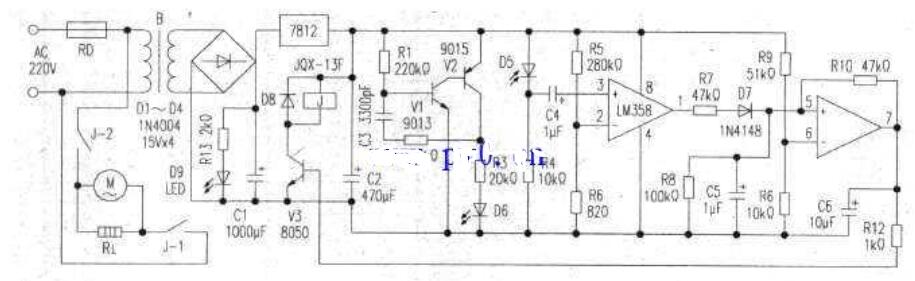
电路中由V1、V2、R1、C3构成一个40kHz振荡器,其输出驱动红外管D6发出40kHz的红外线光。当人手伸到干手器下方时,被手反射的红外线由光电管D5接收,将其转换成半波脉动直流信号,该信号经C4耦合到第一级运放的正输入端进行放大,负端加入一个小的偏置电压,防止小信号干扰。从①脚输出放大后的信号给R7、D7、C5整形及平滑处理成为直流信号,送到第二级运放⑤脚正输入端进行比较放大。第二级运放翻转阈值由⑥脚负输入端外接的R9、R11分压决定,R10是运放的正反馈电阻,与C5、C6共同构成延时电路,防止被探测的手活动时,产生的干扰导致断电现象。当运放⑦脚输出高电平时V3导通,控制继电器接通加热器和吹风机的电源。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
红外自动干手器电路的原理及检修说明2021-05-19 1392
-
红外自动干手器故障原因及排除2019-01-26 8821
-
自动干手器2017-01-04 909
-
传感器综合实验--红外干手器的制作2016-12-11 928
-
自动干手器设计2013-03-22 7044
-
欧莱特SBS-15全自动干手器电路2012-02-28 2367
-
红外线自动干手器2010-05-31 1306
-
什么是红外线自动干手器2010-03-02 1292
-
自制快速干手器电路图2009-07-29 4107
-
红外线自动灯控开关电路图2009-06-12 2154
-
红外遥控快速干手装置电路图2009-05-27 640
-
自动微风远红外干手器电路图2009-05-26 1218
-
自动微风红外干燥器电路图2007-12-12 747
-
[图文]自动干手器电路图2006-04-16 2993
全部0条评论

快来发表一下你的评论吧 !
