

基于ARM处理器和CPLD技术实现智能移动机器人系统设计
可编程逻辑
描述
1、 引言
智能移动机器人集成了机械、电子、计算机、自动控制、人工智能等多学科的研究成果,在当前机器人研究领域具有突出地位。控制系统是机器人的核心部分,目前应用在机器人底层控制系统的微控制器主要有8/16位单片机和数字信号处理器(DSP)两种类型。但使用8/16位单片机处理数据能力低,且硬件电路庞大,系统稳定性弱,DSP的设计初衷是为了数字信号处理,相比而言,嵌入式微处理器ARM具有几乎相同的内部资源和运算速度,但在控制方面性能优于DSP,而且许多ARM器件支持TCP/IP协议,有利于将来机器人的网络控制。综合考虑以上因素,这里提出了一种基于ARM和复杂可编程逻辑器件(CPLD)的智能轮式移动机器人控制系统,实现移动机器人的底层控制。
2、系统组成及工作原理
该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性好。
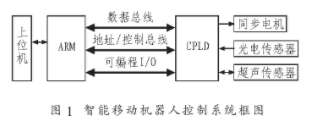
移动机器人以PC机作为上位机,利用摄像头对机器人的自身位置和外部环境进行分析,建立环境地图,进行路径规划。上位机发送运动控制指令给移动机器人的底层控制系统,提供左右驱动电机的理论速度值。以ARM和CPLD为核心的机器人控制系统与上位机通过无线收发模块实现通讯,根据上位机的命令控制电机的运行和超声渡传感器组的发送与接收;并根据障碍物信息,做出避障决策。智能移动机器人的控制系统结构框图如图1所示。
3、控制系统硬件设计
3.1主控模块设计
该智能轮式移动机器人控制系统的核心控制器采用Samsung公司的S3C44B0X,它是基于ARM7TDMI核(适用于实时环境)的32位微处理器,具有高速运算能力、A/D转换器、丰富的I/O端口和中断,有利于实现移动机器人的电机控制、传感器信息处理、外部通讯以及复杂的控制算法。系统采用CPLD作为协处理器,提供可编程脉冲产生电路、光电编码器输入电路、超声波传感器输入电路,这里选择ALTERA公司的MAXⅡ系列EPM1270器件。该系统设计充分利用了CPLD的高速逻辑处理能力,主控制器ARM只需设定控制参数,这样就减轻主控制器的负担,提高系统的实时性,同时也减少了外围硬件电路,提高控制系统的稳定性和可重构性。
ARM与CPLD通过并行总线连接,该并行总线包括ARM器件的地址、数据、控制和多路可编程I/O总线。ARM通过访问特定地址和I/O端口来控制CPLD,CPLD则通过可编程I/O端口向ARM发送中断请求。
3.2电机控制和驱动模块的设计
轮式移动机器人的两个驱动轮速度分别由两台驱动电机控制,实现机器人不同方向和速度的运动。轮式移动机器人的性能要求电机转矩大,脉动小。在高、中、低速下驱动电机均有良好的性能,且控制方式简单,因此驱动电机选用方波驱动的交流永磁同步电机。这种电机根据转子位置反馈信息采用电子换相运行,电机转速与驱动信号的频率成正比,既具备交流电机结构简单,运行可靠,维护方便等优点,又具有直流电机动态特性好,调速性能优良的优点。
系统通过CPLD和外部驱动器件构成控制电路,采用方波驱动和定位控制(通电状态控制)的方式,控制两台永磁同步电机,获得可调的精确速度和位置控制,结构紧凑。两路电机控制原理相同,这里只介绍一路。
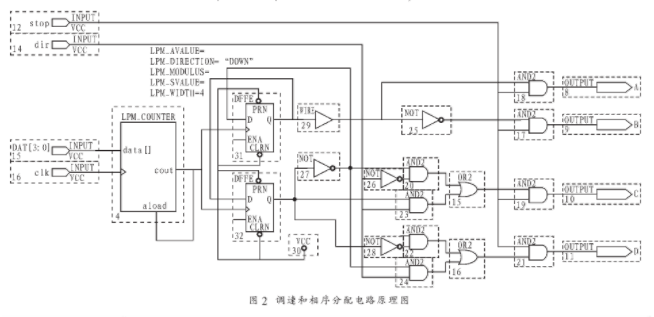
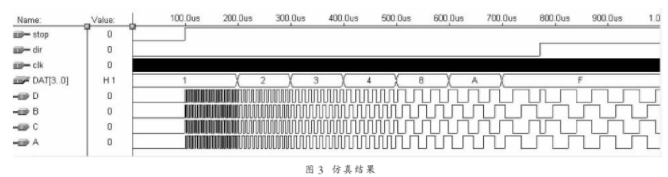
CPLD中的电机控制电路由分频电路、调速电路、相序分配电路组成。其中,分频电路由分频器构成;调速电路是利用MAX+PLUSⅡ的LPM宏单元库的算术运算模块lpm_counter构成可预置数的5位减计数器。根据所需的速度,设置预置数,计数器对分频电路输山的clk脉冲信号减计数至零时输出一个借位脉冲,并再次装入预置数进行减计数,将其借位脉冲cout作为调速电路的输出脉冲,cout借位脉冲的频率范围为fclk/1-fclk/31,即引入了步长为1的调速因子(预置数)。可通过改变调速因子对脉冲信号进行1~31倍的连续可调分频,从而调节电机的转速;而相序分配电路是以cout借位脉冲作为输入,利用两个D触发器和门电路输出4路相位相差90°的方波脉冲,作为两相同步电机的控制信号;stop信号控制电机的启停;dir信号控制电机的转向,正转时相电压uCD超前uAB 90°,反转时uAB超前uCD90°,各相信号的频率为cout脉冲频率的1/4。CPLD中输入的调速和相序分配电路原理见图2。仿真结果验证了设计逻辑的正确性,如图3所示。
外部驱动器采用L298双H桥高电压大电流功率集成电路,将脉冲发牛电路产生的4相方波信号经总线收发器74LS245输出至L298的输入端IN1~IN4,控制H桥的通断,使电机正反转或停止。为防止电机在启停瞬间的反馈电压损坏L298,在L298输出端和电机之间加人8个二极管起断电续流的保护作用。
为了改善电机的控制性能,实现对机器人更精确和稳定的运动控制,需要获得电机的速度信息作为电机控制的反馈环节,该系统采用增量式光电编码器作速度检测,两个光电编码器分别与两路电机同轴相连,由CPLD配合ARM器件实现变脉冲数/脉冲周期测速,即变M/T测速,定时对电机速度进行采样。采样速度和上位机的给定速度所得差值传人PID控制器。从而实现对电机速度的闭环控制。
3.3超声传感模块
避障是智能移动机器人的基本功能,避障的首要任务是确定障碍物位置。PC机基于机器人视觉系统实现的路径规划易受视场光线强弱、背景色等因素干扰,针对这一问题,机器人在单片机控制系统中采用超声传感器测距实现机器人对障碍物的检测和定位。
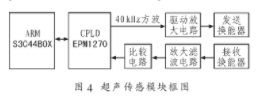
超声波测距采用时间渡越测距法,即根据从超声波发生器发射出超声波到超声波在传播过程中遇到障碍物后超声波接收器接收到反射波所用时间t,以及超声波在空气中的传播速度v(v=331.4(1+T/273)1/2m/s;T为摄氏温度),得出机器人与障碍物之间的距离l=vt/2。该模块共采用3对超声换能器,分布于机器人的正前方、左前方、右前方。ARM发出控制信号启动内部定时器进行定时。控制信号经功率放大后作为超声传感驱动电路的启动信号,由超声传感器产生遇到障碍物时返回的高频振荡信号放大后通过接收电路引起ARM外部中断,在中断程序中可以获得定时器的计数值,并计算出距离。超声传感模块框图见图4。
4、控制系统软件设计
4.1嵌入式操作系统
智能轮式移动机器人是一个典型的实时多任务系统,传统单任务顺序执行机制不能满足该系统设计的实时性要求,而且对于复杂系统来说可靠性不高,因此选用实时操作系统μC/OS-Ⅱ。它是一个源码公开,可移植,可固化,可裁剪的嵌入式操作系统,具有代码尺寸小,可占用实时内核,任务多,可确定执行时间,运行稳定可靠等特点。将μC/OS-Ⅱ移植到S3C44B0X上,并对操作系统进行裁剪,以节省存储空间。
基于实时内核的多任务系统可划分为系统层和应用层。系统层由内核和驱动程序库组成;应用层包括用于达成机器人任务目标的全部代码。在该系统软件应用层程序设计中,将机器人的任务分解成通信、信息采集、电机控制等多个用户任务。嵌入式操作系统μC/OS-Ⅱ对任务模块进行管理调度,协调机器人各项任务运行,保证了系统的实时性和可靠性。
4.2运动控制算法
为了保证移动机器人运动的稳定性和准确性,使得系统在控制机器人前进、后退、转弯、刹车等动作时都能快速响应且超调量小,在控制电机的过程中,系统采用了积分分离的PID控制算法。算法的具体实现方法如下:

5 、 结语
提出了一种基于ARM和CPLD的智能轮式移动机器人控制系统,这一方案充分利用ARM和CPLD的内部资源,既具有ARM微控制器体积小,运算速度快等特点,又具有CPLD的高速逻辑处理能力,灵活的可扩展性和可重构性。软硬件的调试和运行实验证明,系统控制灵活,实时性好,可靠性高,能够满足智能轮式移动机器人的控制需求。这种智能轮式移动机器人的控制系统可用于不同场合的移动机器人控制系统,并具有一定的普遍适用性,且性价比高,具有很强的实用价值。
责任编辑:gt
-
移动机器人常用传感器2012-08-20 6922
-
资料:移动机器人能否自动充电?2016-01-20 5177
-
Labview My RIO 移动机器人2016-08-21 13629
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4129
-
基于FPGA怎么实现三轮全方位移动机器人运动控制系统?2019-10-22 3112
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 2185
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3797
-
如何实现移动机器人的设计?2020-11-23 3304
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2985
-
什么是移动机器人软硬件系统问题2021-08-06 2515
-
移动机器人的三种主要运动系统2021-09-01 2240
-
详解移动机器人软硬件系统问题2021-11-11 2573
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2159
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 806
-
基于ARM的移动机器人组合导航系统设计与实现2017-09-25 1002
全部0条评论

快来发表一下你的评论吧 !
