

CAN-bus的基本原理、主要特性及在门禁系统中的应用
接口/总线/驱动
描述
CAN_bus总线简介
CAN-bus(ControllerAreaNetwork)即控制器局域网,是国际上应用最广泛的现场总线之一。起先,CAN-bus被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。由于其技术先进、可靠性高、功能完善、成本合理,CAN_busCAN-bus已被广泛应用到各个自动化控制系统中。例如,在汽车电子、自动控制、智能大厦、电力系统、安防监控等各领域。
CAN-bus是一种多主方式的串行通讯总线,具有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN-bus仍可提供高达5Kbps的数据传输速率。
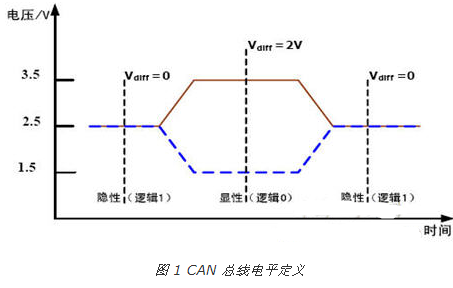
CAN总线电平定义和通讯距离
CAN总线采用两种互补的逻辑数值“显性”和“隐性”。“显性”(“Daminant”)数值表示逻辑“0”,而“隐性”(“Recessive”)表示逻辑“1”。当总线上同时出现“显性”位和“隐性”位时,最终呈现在总线上的是“显性”位。CAN_H和CAN_L表示CAN总线收发器与总线的两接口引脚,信号是以两线之间的“差分”电压Vdiff形式出现。
在“隐性”状态下,VCAN_H和VCAN_L被固定与平均电压电平,Vdiff近似为零,此时VCAN_H和VCAN_L的标称值为2.5V。“显性”位以大于最小阀值的差分电压表示,此时VCAN_H的标称值为3.5V,VCAN_L的标称值为1.5V。如图1所示。在总线空闲状态,发送隐性位。
CAN总线上任意两个节点之间的最大传输距离与其通讯波特率有关,如表1所示。
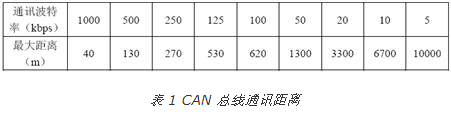
这里最大通讯距离是指在同一条总线上任意两个节点之间的距离。
CAN-bus的主要特性如下:
低成本的现场总线;
极高的总线利用率;
很远的数据传输距离(长达10Km);
高速的数据传输速率(高达1Mbps);
多主结构依据优先权进行总线访问;
可根据报文的ID决定接收或屏蔽该报文;
可靠的错误处理和检错机制;
发送的信息遭到破坏后,可自动重发;
节点在错误严重的情况下具有自动退出总线的功能;
报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息;
CAN-bus在门禁系统中的应用
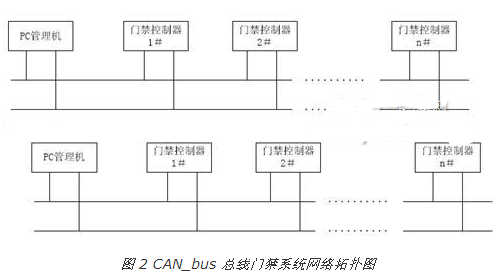
作为公共安全的一个组成部分,门禁系统的可靠性、安全性、稳定性是一个很重要的指标。而CAN_bus所具有的高抗干扰能力、多主结构、可靠的出错处理机制、节点在严重错误的情况下自动退出总线等特点,使CAN_bus总线在门禁系统中具有很强的优势。在CAN_bus门禁系统中采用双绞线作为传输介质,网络连接采用总线连接方式。如图2所示:
CAN控制器具有硬件仲裁机制,并且根据报文的ID决定其发送的优先权。因此在CAN网络中,每个节点都可以作为主机发送数据,当有事件发生时,控制器不必等待主机的查询就可以主动发送数据,这大大提高了系统的实时性;当数据发生错误时,CAN可以自动重发,这提高了系统的可靠性。
CAN控制器可以根据报文的ID决定是否接收或屏蔽改报文,使门禁控制器可以根据需要接收想要的信息,屏蔽不需要的信息,减轻了门禁控制器的通信管理任务,提高了系统的稳定性。
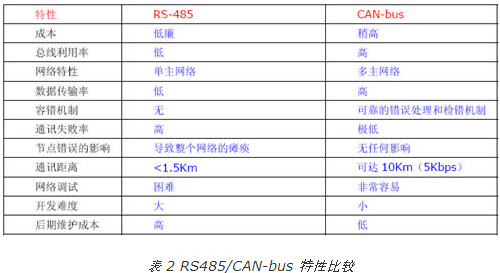
在传统的RS485总线中,当一个节点发生错误时,会影响到整个系统的运行,甚至引起整个系统的瘫痪,维护成本高,网络调试复杂。而CAN控制器在节点发生错误时自动进行错误出错处理,当错误严重时自动退出总线功能,不会影响整个网络的运行,使系统的安全性大大提高,同时降低了网络调试的工作量,维护成本变低。
责任编辑:gt
-
如何高效稳定地实现动力电池系统的CAN-bus组网2022-04-06 4922
-
CAN-bus总线技术在工程机车控制网络中的应用研究2020-03-27 3211
-
汽车CAN-BUS系统详解2017-12-08 3834
-
现代汽车CAN-BUS维修2017-09-14 1439
-
CAN-bus现场总线基础方案_通信2017-02-07 1339
-
CAN-bus 开发步骤2012-08-08 2339
-
CAN-bus应用方案2011-03-09 2563
-
智锐CAN-BUS智能门禁管理系统方案2010-03-29 2342
-
CAN-bus应用方案(1)2010-03-22 602
-
CAN-bus器件是什么意思2010-03-18 3757
-
CAN-BUS,CAN-BUS是什么意思2010-03-11 18657
-
CAN-bus应用解决方案2009-09-25 583
全部0条评论

快来发表一下你的评论吧 !
