

什么是plc顺序控制?plc顺序控制设计方法
PLC/PAC
描述
在生产机械的自动控制领域,PLC顺序控制系统的应用量大面广。然而,工艺不同的生产机械要求设计不同的控制系统梯形图。目前,不少电气设计人员仍然采用经验设计法来设计PLC顺序控制系统,不仅设计效率低,容易出差错,而且设计阶段难以发现错误,需要多次调试、修改才符合设计要。
什么是plc顺序控制?
顺序控制通常是对一些开关量的控制如按钮、限位开关等输入内容以及指示灯、中间继电器等输出内容,这里主要针对是逻辑控制,它是我们plc的基本控制内容。可以说是在传统继电器系统发展起来的,因此这里我们实验平台需要的东西有:
1、输入相关器件
常见的是按钮开关一类的,而且形式是多种多样的有旋转按钮、复位按钮、急停开关,脚踏开关。除此之外就是限位开关一类的有行程开关、接近开关,行程开关是靠机械位置进行闭合多为两线制,接近开关是靠感应位置进行闭合,有两线制和三线制(NPN型和PNP型)的常闭或者常开类型,它们一般用在设备上的极限位置。
2、输出相关器件
输出的内容比较多,PLC般不能与控制外围设备直接进行连接,需要通过中间继电器、接触器的形式进行控制,常见的控制对象有三相异步电机、各种电磁阀包括水阀、气阀的。PLC的输出类型一般分为晶体管和继电器类型,晶体管可以驱动直流负载开关频率很高经常控制脉冲输出,继电器可以驱动任何形式的负载,只不过开关频率有一点的限制,可直接驱动一些交流负载如接触器。
这部分的学习内容是比较基础的也是我们常见的低压元器件,我们以控制三相异步电机的启保停、正反转、通电断电延时为例建实验平台,主要有按钮、中间继电器、接触器、小功率的三相异步电机,最好能够搭建一个机械的移动平台(电机连接丝杆),可以增加行程开关或者接近开关进行限制。
三种简易设计方法,能快速一次设计成功PLC顺序控制系统
顺序控制系统特点
顺序控制是指在生产过程中,各执行机构按照生产工艺中预先设定的动作顺序以及相应的转换条件,一步一步进行的自动有序操作的过程。
为了使顺序控制系统工作可靠,通常采用步进式顺序控制电路结构。所谓步进式顺序控制,是指控制系统的任一程序步(以下简称步)的得电,必须以前一步的得电并且本步的转换主令信号已发出为条件。
对生产机械而言,受控设备任一步的机械动作是否执行,取决于控制系统前一步是否已有输出信号及其受控机械动作是否已完成。若前一步的动作未完成,则后一步的动作无法执行。这种控制系统每步之间互锁严密,即便转换主令信号元件失灵或出现误操作,也不会导致动作顺序错乱。
顺序控制系统简易设计法的设计思路
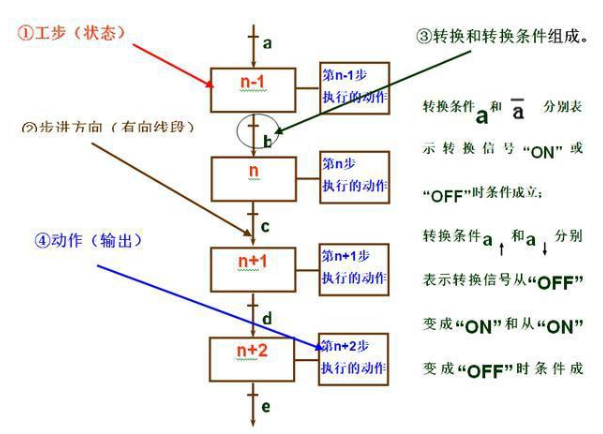
功能表图又称作状态转移图,它是描述控制系统的控制过程、功能和特性的一种图形,也是设计PLC的顺序控制程序的有力工具。功能表图并不涉及所描述的控制功能的具体技术,它是—种通用的技术语言。功能表图的一般形式,主要由步、有向连线、转换、转换条件和动作(命令)组成。因此,程序设计关键是绘制功能表图。
根据控制系统的工艺要求,利用功能表图设计梯形图程序的步骤可归纳为:
分析被控对象的工作过程,确定各工作状态;
分析相邻状态间的转换条件,确定状态转移流程图;
确定PLC型号,确定各状态标志位,分配输入/输出元件;
依据(1)(2)(3)画出顺序功能表图;
依据功能表图编写梯形图程序。
功能表图的框架结构如下:
举例说明三种简易设计方法
下面以某液压滑台的整个工作过程为例说明设计方法。
(1) 液压滑台工作过程
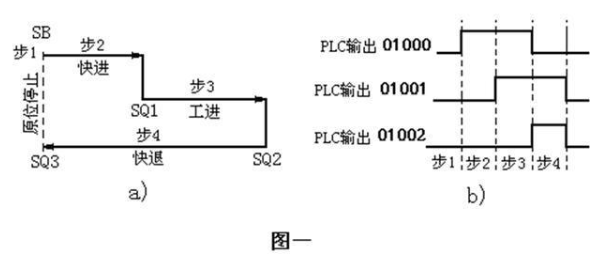
液压滑台在原始位置时处于停止,按下启动按钮,滑台快速移动,接近工件时变为工作进给,加工工件,加工完毕,滑台快速退回到起始位置后停止。
依据液压滑台工作过程,可以将其划分为停止(原位)、快进、工进、快退四个工作状态,又称四个工步。
(2) 滑台工作流程图和状态转换条件如图一所示。
(3)选择CPM1A-20CDR型PLC,各状态标志位以及输入/输出元件分配情况如下;
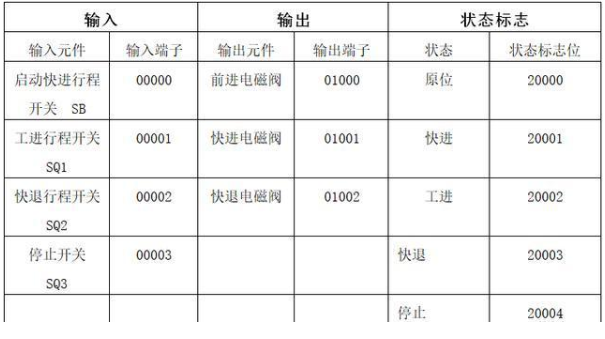
液压滑台控制 I/O分配表
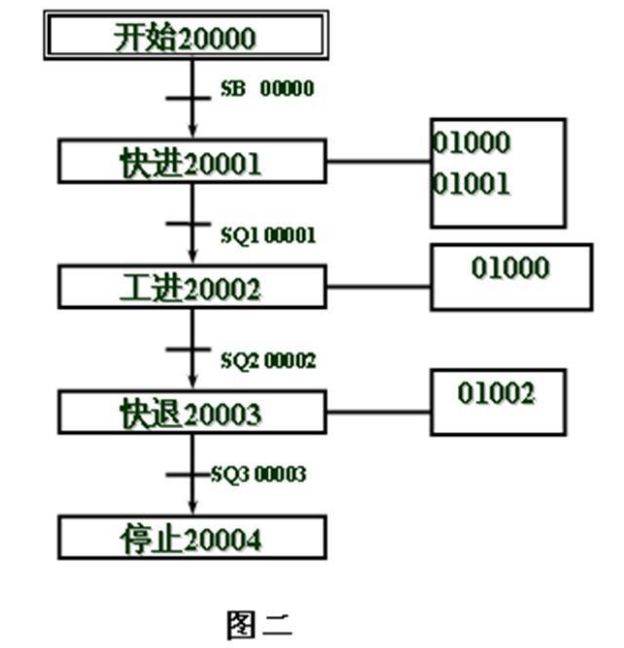
(4)依据流程图、I/O分配表绘制功能表图(见图二):
基本逻辑指令设计程序
如图三所示
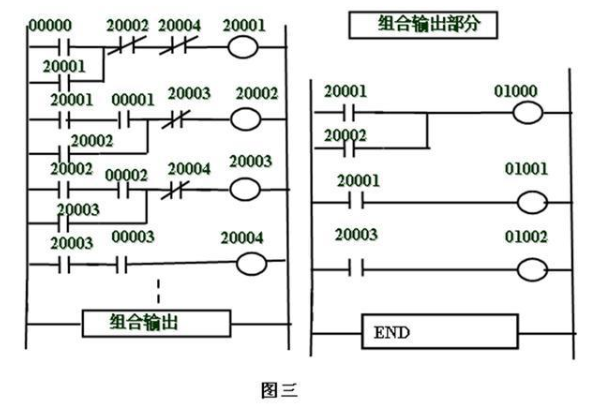
这种设计方法是根据“与”、“或”、“非”的基本逻辑关系,设计成串联、并联或串、并联复合的电路结构。快进步(20001)得电条件是滑台停在原位SQ3处于压合状态,满足原位条件后按起动按钮SB(00000)20001才能得电。20001得电后自锁,并为工进步提供步进条件信号。快进步的执行动作完成时触发的行程开关信号SQ1作为工进步的转步条件。
工进步(20002)的输入满足其步进条件和转步条件后得电自锁,并为下一步快退步提供步进条件信号。按此规律即可实现后续每一工作步状态继电器的得电和自锁。停止步(20004)的步进条件信号和转步条件信号分别为:快退步(20003)动作完成时触发SQ3。
由于20004的得电信号令控制系统失电,所以2004的电路不自锁,且要将其常闭触点串联在步1的电路中。应该注意的是:无论工作步还是停止步,如果某步的转步信号有多个,则应将多个转步信号互相串联。
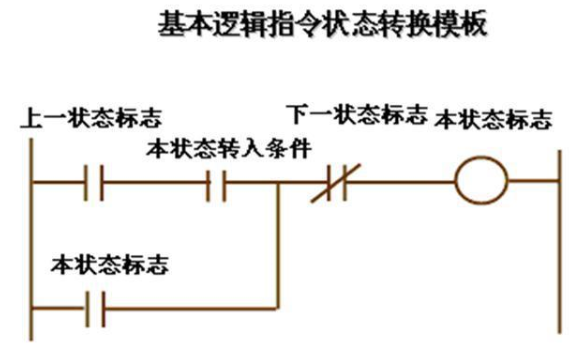
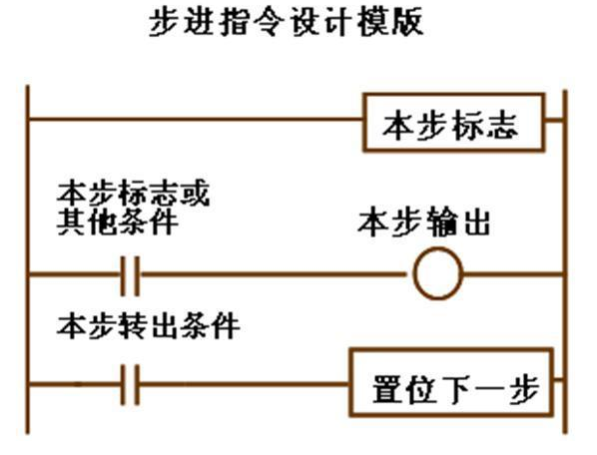
利用基本逻辑指令设计梯形图程序时,状态转换可以概述为下列模版。
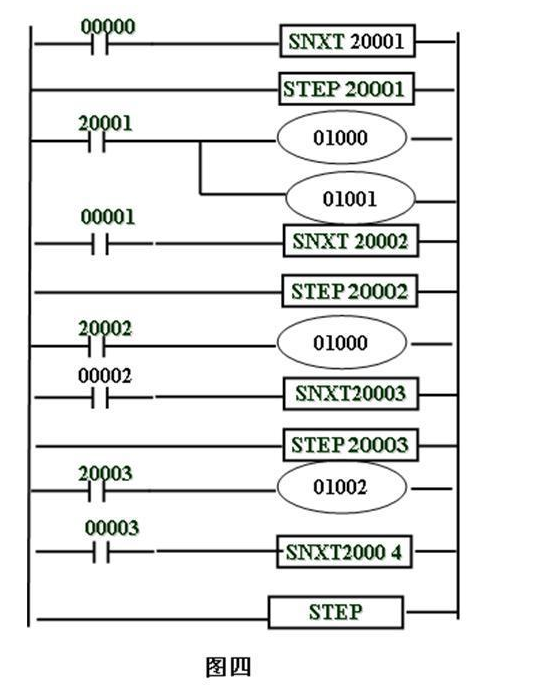
步进指令设计程序
如图四所示
步进控制指令的关键是熟悉步进指令的含义。步进指令包括步进控制领域定义STEP和步进控制SNXT两种类型指令。其格式为:
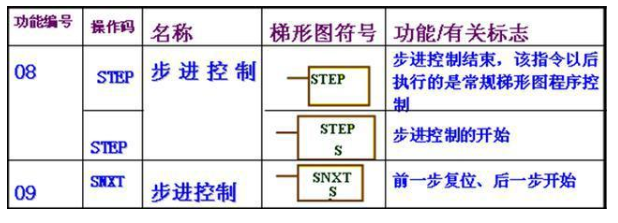
格式中的“S”,表示“步”的状态标志继电器。
程序解读:
第一逻辑行,按钮SB按下,内部输入继电器00000有输出(置1),控制快进步(20001)开始;
第二逻辑行,将由20001控制的步(快进)激活(置1),即快进步成为活动步;
第三逻辑行,由20001控制前进电磁阀(01000)和快进电磁阀(01001)同时输出,从而驱动动力头快速前进。
第四逻辑行,快进到压下工进电磁阀SQ1时,内部输入继电器00001有输出(置1),使快进步(20001)复位,同时使工进步(20002)开始。
第五逻辑行,将由20002控制的步(工进)激活(置1),即工进步成为活动步;
第六逻辑行,由20002控制仅前进电磁阀(01000)输出,从而驱动动力头工作速度进给。
第七逻辑行,工进到压下工进电磁阀SQ2时,内部输入继电器00002有输出(置1),使工进步(20002)复位,同时使快退步(20003)开始。
以下依次类推……
当指令执行到指令“STEP”时,表示步进控制程序结束。
利用步进指令设计梯形图程序,步进关系比较清晰。但要熟悉步进指令的使用方法。
利用步进指令设计梯形图程序时,可以概述为下列模版。
置位/复位指令设计程序
如图五所示
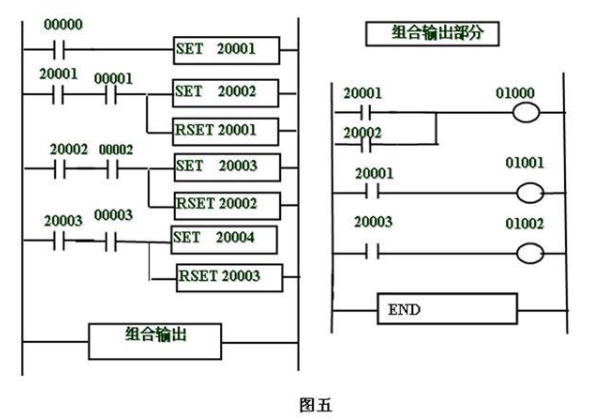
置位/复位指令一般成对使用,对某个继电器置位(SET)后,只有使用复位指令(RSET)才能对其进行还原即复位。否则,置位继电器会一直保持置位状态不变。因此,该程序设计时在满足工步转换条件后,下一个工步置位的同时还要让上一个工步复位。即出现了两个指令并联的情况。
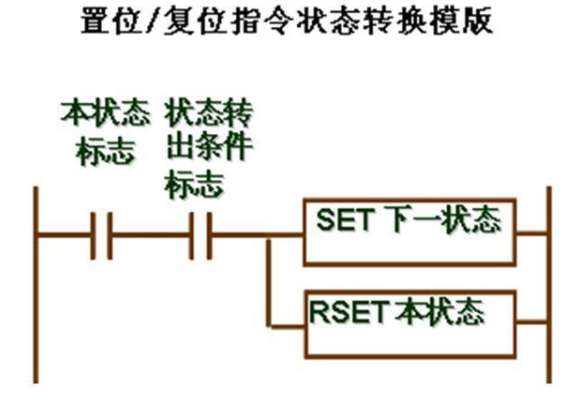
利用置位/复位指令设计梯形图程序时,状态转换模版如下:
结束语
用基本指令编写的梯形图较长,但灵活性好,可用来编制较复杂的梯形图;用步进指令编写的梯形图较为直观,和顺序功能图有很好对应关系,可直接从顺序功能图得到梯形图;用置位/复位指令编写的梯形图程序要注意转换条件与步进指令不同,置位/复位指令要满足上一步正在执行和转步条件同时存在才能实现转步。
除此之外,顺序控制系统还可以使用移位指令编写梯形图,关键是要处理好移位脉冲产生的问题。 总之,对同一个问题,处理的方法有很多种。只要我们在学习和工作中不断总结,一定能提高我们的编程水平。
-
PLC顺序功能图是什么2024-06-19 4058
-
PLC顺序控制方法之Graph编程介绍2023-08-02 17492
-
基于第三种方式实现程序的PLC顺序控制2023-07-19 2547
-
PLC实例:顺序控制指令,实现搬运动作2023-06-26 5088
-
PLC顺序控制的几种方式2023-05-19 6760
-
顺序控制PLC控制系统和顺序功能图2022-10-26 8201
-
plc顺序控制介绍 plc顺序设计方法2021-12-08 3043
-
探究VASS的PLC顺序控制程序到底该如何使用2021-03-10 3118
-
plc顺序控制的编程方式有哪些2020-06-04 10246
-
PLC编程算法,模拟量的顺序控制方法2018-07-11 2072
-
PLC顺序控制正反转控制按钮开关冲孔加工等原理动图大全2018-04-30 17978
-
三菱plc如何实现顺序控制_四种三菱plc顺序控制编程方式实例2018-04-02 44563
-
海为PLC在顺序控制上的应用2017-10-06 950
-
顺序控制,顺序控制是什么意思2010-03-18 7424
全部0条评论

快来发表一下你的评论吧 !
