

激光雷达的标定_激光雷达的功能
电子说
描述
激光雷达的标定
1、旋转
三个角度,旋转角、俯仰角、横摆角
可以涉及到投影,投影是平行投影。
这里倾角会有不同,但是投影的形状是一定的。三角形投影下来,还是三角形。
人为的倾斜雷达,他们测量得到的距离是相对于雷达坐标系的,而并不是相对于车体坐标系的。
坐标系:笛卡尔坐标系

横摆角矫正:xy平面
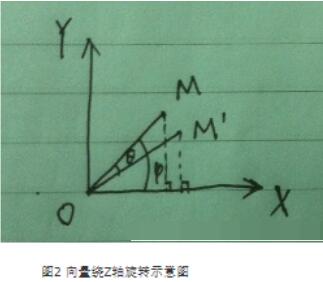
xx=xcosa+ysina
yy=ycosa–xsina
俯仰角矫正:yz平面
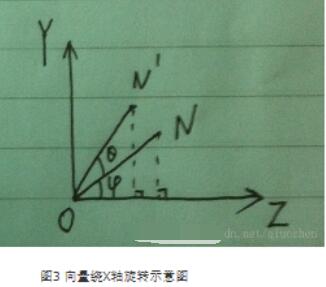
yy=ycos+zsina
zz=zcosa–ysina
旋转角矫正:xz平面
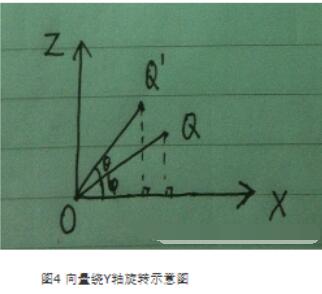
xx=xcosa-zsina
zz=zcosa+xsina
合起来就是一个四维的旋转矩阵。
2、平移
xx=xx+w;
yy=yy+h;
zz=zz+z;
通过以上6个参数:三个角,三个偏移,就可以解决多线激光雷达标定问题。
激光雷达的功能
激光雷达具有高精度电子地图和定位、障碍物识别、可通行空间检测、障碍物轨迹预测等功能。
(1)高精度电子地图和定位 利用多线束激光雷达的点云信息与车载组合惯导采集的信息,进行高精度电子地图制作。无人驾驶汽车利用激光点云信息与高精度电子地图匹配,以此实现高精度定位。
(2)障碍物识别 利用高精度电子地图限定感兴趣区域(ROI)后,根据障碍物特征和识别算法,进行障碍物检测与识别。
(3)可通行空间检测 利用高精度电子地图限定ROI后,可以对ROI内部(比如可行驶道路和交叉口)点云的高度及连续性信息判断点云处是否可通行。
(4)障碍物轨迹预测 根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人驾驶汽车规划(避障、换道、超车等)的判断依据。
- 相关推荐
- 热点推荐
- 激光雷达
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30596
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 10168
-
谈一谈自动驾驶的激光雷达2021-06-17 13504
-
激光雷达2021-01-17 20251
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5824
-
TOF激光雷达2019-06-07 9366
-
激光雷达和相机之间的外参标定2019-04-12 6608
-
机器人和激光雷达都不可或缺2019-02-15 6258
-
北醒固态设计激光雷达2018-01-25 5921
-
消费级激光雷达的起航2017-12-07 7538
-
激光雷达面临的机遇与挑战2017-09-26 6774
-
常见激光雷达种类2017-09-25 14058
-
激光雷达分类以及应用2017-09-19 8955
全部0条评论

快来发表一下你的评论吧 !
