

参数自适应模糊PID控制器的设计
嵌入式设计应用
描述
参数自适应模糊PID控制器的设计
温度控制系统中,采用了非线性的隶属度函数,以模糊控制为粗调、PID为细调。在模糊控制的基础上,由PID控制系统向零点移动,实现无差控制。模糊控制结构参数自整定PID控制器的系统结构主要由参数可调PID和模糊控制系统两部分组成,模糊参数自整定PID控制系统结构如图3所示。
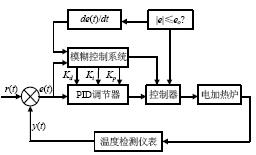 图3 模糊参数自整定PID控制系统结构图
图3 模糊参数自整定PID控制系统结构图
其中r(t)为设定值,y(t)为炉温的跟踪测量值,e(t)是测量值y(t)与设定值r(t)的偏差,e0为偏差的阈值。模糊推理系统以误差e(t)和误差变化率de(t)/dt作为输入,采用模糊推理方法对PID参数Kp,Ki,Kd 进行在线整定,以满足不同的误差e(t)
和误差变化率de(t)/dt对控制器参数的不同要求,而使被控对象具有良好的动态、静态特性。基本控制思想是当偏差值e(t)在|e|>e0时,采用模糊控制;当e在|e|≤e0时,采用PID调解器控制。模糊控制和PID控制的转换由单片机80C196程序根据|e|>e0或|e|≤e0自动实现。系统PID控制器的控制算式可表示为:
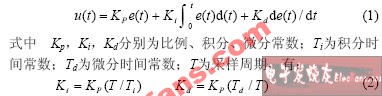
采用文献中的PID参数整定原则,根据系统在受控过程中对应不同的|e|和|de(t)/dt|大小,对PID参数进行自整定,系统实现模糊控制。将PID参数的整定原则归纳如下:1) 当|e|较大时,取较大的Kp与较小的Kd,使系统具有较好的跟踪性能,同时为避免出现较大的超调,应对积分作用加以限制,通常取Ki =0;2) 当|e|处于中等大小时,为使系统响应超调较小,Kp应取小些。该情况下,Kd的取值对系统响应影响较大,Ki的取值要适当;3) 当|e|较小时,为使系统具有较好的稳定性,Kp与Ki均应取大些,同时为避免系统在设定值附近出现振荡,Kd值的选择根据|de(t)/dt|值较大时,Kd取较小值,通常Kd为中等大小。
文献: 熔盐电化学反应炉温度控制系统研究
- 相关推荐
- 热点推荐
- PID
-
如何去设计温度模糊自适应PID控制器?2021-05-07 2470
-
模糊自适应PID控制的液压提升分析2017-11-24 1004
-
模糊自适应PID控制的研究及应用仿真_张泾周2017-01-31 1187
-
一种自适应模糊PID控制器应用仿真2016-07-19 1245
-
基于自适应模糊PID控制的恒压供气系统2016-04-06 758
-
基于DSP的异步电机自适应模糊PID控制的设计2016-04-05 1049
-
模糊自适应PID控制器设计2016-01-18 810
-
模糊自适应PID控制方法2012-08-18 6219
-
网络控制系统的模糊自适应PID控制2010-07-13 592
-
基于FPGA的温度模糊自适应PID控制器的设计2010-01-22 1817
-
模糊自适应PID在机组协调控制中的应用2010-01-11 847
-
模糊自适应PID控制器在张力控制中的应用2009-07-09 728
-
参数自适应模糊PID 控制器在温度控制系统中的应用Param2009-06-09 591
全部0条评论

快来发表一下你的评论吧 !
