

水下机器人技术解析之水动力学系数
机器人
描述
(文章来源:网络整理)
求解基本原理:对于水下机器人的的水动力学系数的求解与分析属于计算流体动力学(CFD)的范畴,计算流体动力学是在流体力学的基础上发展而来的,其建立在流体力学基本控制方程的基础上。这些方程任何流动都必须遵守质量守恒定律、牛顿第二定律以及能量守恒定律。
前处理过程:将设计好的三维模型导出为STEP格式,并将其导入到workbench中,模拟机体外部流体环境,添加计算域。保持机体的原点与计算域的原点重合且坐标方向一致。之后在workbench的工作区间添加mesh模块,将之前的几何模型模块与mesh模块链接,打开mesh模块的编辑区间。
Defaults:Physics Preference选取CFD,Solver Preference选取Fluent;Sizing: Size Function选取Curature,Relevance Center和Span Angle Center均选择Fine;Quality: Smoothing选取为Fine。其他保持默认不变。对计算域和机体均进行网格划分。打开Mesh Metric的Element Quality显示网格划分质量。当网格单元质量划分越趋近于1时其网格划分质量越好。
计算过程:首先对网格质量进行检查,选择General的Check。之后在Fluent中进行参数设定,选取计算域材料,并添加机器人所在海域大致的密度和动力粘度,设置残差收敛值和迭代次数,可以根据需要将介质调整为海水,并依据其工作海域的密度的动力系数进行调整,其具体的数据需要根据真实实验结果进行调整。
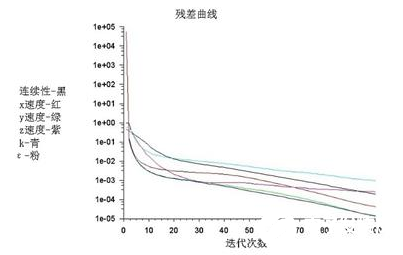
同时也可以根据需要适当的调整收敛值和迭代次数以保证残差的收敛性能够得到充分的体现。并且设置残差监视器和阻力系数、升力系数以及扭矩系数的监视器,以便于对实时阻力系数的观测、计算结果的导出以及之后对于计算结果的分析。
(责任编辑:fqj)
-
Adams多体动力学仿真解决方案全面解析2025-04-17 8204
-
水下机器人便携式遥控单元设计2011-03-08 10091
-
请问各位在labview MathScript节点中 以下这个机器人的动力学公式应该怎么编写呢?2017-11-16 4707
-
如何设计水下机器人嵌入式控制系统?2019-10-29 3972
-
一个描述机器人刚体动力学的系统模型2021-09-15 1394
-
水下机器人制作需要实现哪些功能呢2022-01-11 1376
-
空间柔性机器人动力学分析的快速积分算法2010-03-18 654
-
技术到应用面临几道坎 我国水下机器人需乘势而上2016-12-22 1645
-
水下机器人研发挑战海外市场2017-09-27 1315
-
自由度下的水下机器人控制器抗干扰设计2017-10-28 1210
-
水下机器人发展现状,虚假繁荣还是水下机器人元年2017-11-30 7193
-
这些水下机器人你见过吗?一些水下机器人产品的介绍2018-07-07 17125
-
水下机器人亟待解决的关键技术问题2019-07-17 14420
-
机器人原理与应用之机器人动力学2021-05-19 1386
-
基于动力学模型的机器人介绍2023-11-17 2012
全部0条评论

快来发表一下你的评论吧 !
