

采用CAN总线技术实现电话程控交换机的通信系统设计
通信网络
描述
在电话程控交换机中,控制系统由前端处理、主控制和维护管理三级处理系统构成。
主控制机与前端处理机之间有通信处理机,它主要完成通信功能,将从各从节点传来的信息整理打包传往主控单元,并将从主控单元发送来的命令分配发往各从节点。其中,前端处理机与主控机连接的电路结构如图1所示。
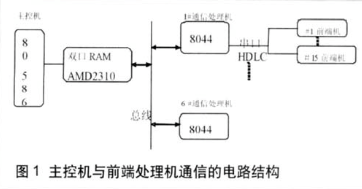
主控制机与6个通信处理机之间通过双口RAM,以中断方式传送数据,每个通信处理机与前端处理机都采用具有HDLC协议的8044芯片,各前端机不能主动发起与通信控制机的通信,必须等待通信控制机询问该节点时才能向它发送数据。
对于图1的应用,本文采用CAN总线技术来实现,大大减化了软硬件设计,降低了成本。
CAN总线设计关键点
物理层设计
CAN总线为了使用的灵活性,没有严格定义物理层的连接和媒质,这虽然使物理层的设计相当灵活,但对CAN总线设计的新手来说,此处也是容易出问题的地方。从应用来看,CAN控制器只引出了TX0、TX1两个发送输出端(它们具有互补的电平输出)和RX0、RX1两个差分比较输入端。因此,应用中要根据需要自行设计物理层的连接和总线电平。
总的原则是:针对TX0、TX1的两种输出状态(显性、隐性),总线应具有两种不同的电平,这两种电平可以使差分输入的接收端呈现两种状态(显性、隐性)。根据不同的传输距离和传输速率要求,有着相应的设计方案,本文图2所示的电路中,CAN总线控制器采用的是SJA1000,物理层驱动采用PCA82C250,通过设置PCA82C250的引脚8(Rs)可以使其分别工作在高速、斜率控制和待机方式下。在斜率控制工作方式下,对于较低速度或较短总线长度的应用场合,可用非屏蔽双绞线或平行线作总线,为降低射频干扰,可通过调整引脚8到地的连接电阻大小来实现。为了增加抗干扰能力,图2电路中在CAN控制器和PCA82C250之间加入了6N137高速光耦。该方案的主要特点是:位速度:0~1Mbit/s;节点数:2~110个。

软件编程
所有的CAN控制器具有相同的结构和顺序,只不过是在存储器中映象的偏移量不同。图2所示的电路中,CAN控制器SJA1000寄存器定义在4000H~401DH的范围之内。CAN总线数据通信的软件编程通过对30个寄存器的操作来完成,其收发的程序框图如图3所示。
程控交换机中主控机与前端处理机通信的电路设计
对于图1所示的电路,若采用CAN总线通信方式,则省去了通信处理机,硬件结构简单,且各节点都可以作为主节点发起通信,其电路结构如图3所示。主控制机由80586和CAN适配器构成,适配器上的8051与80586通过双口RAM,以内存映射方式交换信息。这里着重介绍前端机部分,前端机主要由8051、SJA1000和PCA82C250等构成,控制译码电路由GAL22V10完成。其电路如图4所示。

CAN控制器SJA1000的数据与地址端是时分复用的,其读写时序与8051读写片外RAM时的操作是兼容的,故其可以与8051直接相连,而不需要加地址锁存器。
前端机CAN总线的初使化、发送及接收程序框图如图5所示。

责任编辑:gt
-
程控交换机直流电子设备滤波器的关键作用与技术解析2025-12-18 785
-
程控交换机直流电源滤波器:保障通信稳定的关键2025-08-25 990
-
电话配线架怎么跟电话程控交换机连接2024-08-22 4558
-
怎么实现程控交换机呼叫信息缓冲系统的设计?2021-05-31 1168
-
如何利用CAN总线去设计程控交换机?2021-05-25 2016
-
工控交换机和工业交换机的区别2019-12-05 3121
-
虚拟交换机有什么特点?2019-11-06 3766
-
程控交换机是什么_程控交换机怎么设置的2018-03-07 10217
-
会讯通:模拟交流机、数模混合机、数字程控交换机的差别2016-12-14 2793
-
程控交换机系统简介2011-02-24 847
-
小型程控交换机供电系统电路2009-10-23 2035
-
程控交换机原理2009-06-15 942
-
电话交换机工作原理2008-07-18 11432
全部0条评论

快来发表一下你的评论吧 !
