

智能寻迹小车的设计方案
电子制作
描述
本车除一般非编程寻迹车具有的寻迹功能外,还增加了遇障停车、报警,转弯时转向灯提示功能。同时在电路原理上作了较大改变,是车寻迹灵敏度更高,实现较小的转弯半径。
设计方案
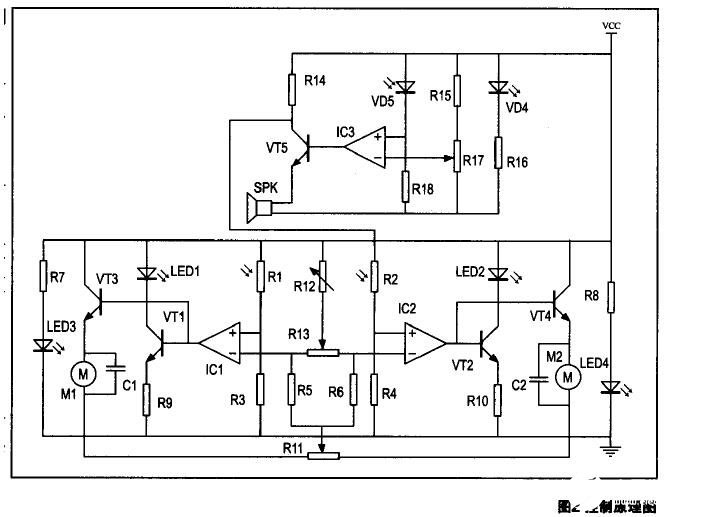
根据不同的颜色(黑、白)对光的反射强度不同,光敏电阻受不同强度光感应阻值不同的特性。分别将两电位器与两固定电阻分压后的电压作为电压比较器的基准电压,两光敏电阻与两固定电阻分压后电压作为电压比较器的比较电压,电压比较器的输出电流经三极管放大后分别控制两个电动机的转速。以达到转向的目的,从而实现智能车按既定轨道行走。通过红外传感器检测障碍实现避障报警功能(见图1)。电路原理图见图2。
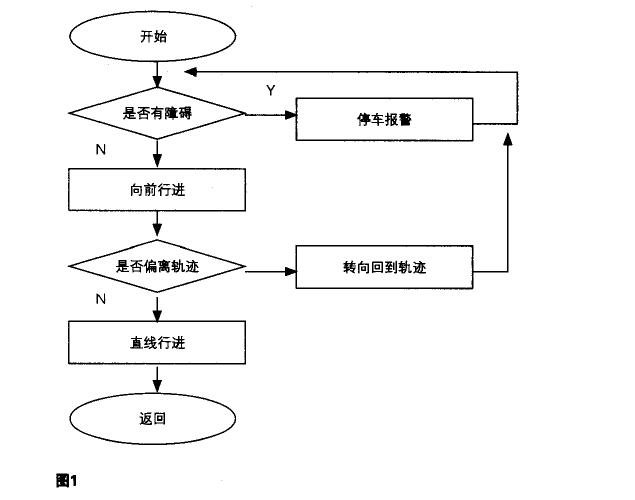
控制原理
①如图2中电位器R12、R13、R17与R5、R6、R15组成分压电路为电压比较器提供基准电压,光敏电阻R1、R2、红外接收器VD5与电R3、R4、R18组成比较电压,发光二极管LED1、LED2与三极管T1、T2及电阻R9、R10组成转向灯。发光二极管LED3、LED4与R7、R8组成光敏电阻的补光灯,红外发射二极管VD6及电阻R16组成红外发射源。R14、三极管VT5及蜂鸣器组成报警装置。三极管VT3、VT4与电动机及电容组成动力部分。
②当前方无障碍时。红外接收器不能接收到红外线呈高阻态,电压比较器IC3输出低电平,三极管VT5不导通。光敏电阻输入电压较高,电压比较器ICl、IC2正常工作,蜂呜器不响。当前方有障碍时,红外接收器接收到红外线呈低阻态,电压比较器IC3输出高电平,三极管VT5导通,光敏电阻输入电压被拉低,电压比较器lC1、IC2通向输入端收入电压较低,三极管VT3、VT4不导通,故小车不前进同时蜂鸣器报警。
③正常行走时两光敏电阻R1、R2都在强光区,阻值较小,电压比较器IC1、IC2输出高电平,两个电动机都转动,小车直线前进,两个转向灯都不发光。当小车
偏向轨道右侧时,左边的光敏电阻R1转向弱光区,其阻值变大,相应电压比较器IC1输出低电平,左边电动机M1停止转动,小车向左转弯,同时左边转向灯LED1发光。当小车偏向轨道左侧时,右边的光敏电阻R2转向弱光区,其阻值变大,相应电压比较器IC2输出低电平,右边电动机M2停止转动,小车向右转弯,同时右边转向灯LED2发光。
④其中R17用来调节红外线感应距离,R12用来调节比较电压大小,以实现感光灵敏度的调节。R13用来调节左右比较电压的比值,使左右灵敏度一致,R11用来调节通过两电动机的电流比值,使两电动机的转速一致。LED3、LED4用来补偿光敏电阻所需光源,防止外界光照不均匀造成左右电动机转速不一致,这样即使在黑暗中小车也能正常行走。电容C1、C2用来稳定电压,防止电动机启动和停止时过大的电流对其他元器件的干扰。
1.电路板焊接
由于电路板还是车架的一部份,所以电路板的焊接要做好电子元件的布置:两个光敏电阻R1、R2和两个补光灯LED3、LED4安装在小车前面的两侧,并向下离地面5mm左右。两个转向灯LED1、LED2安装在小车前面的两侧指向前方。红外收发器VD5、VD6最好用成对反射型的,装在前侧面水平指向前方。电池最好装在车体偏前侧以增大小车驱动轮的摩擦力。其它元件要偏后一点以便安装电池盒和驱动轮。注意后侧中间还要装万向轮。
2.结构部分制作
用通用电路板充当车架,为了转向更灵活最好使用前轮驱动,后轮只在中间装一个万向轮。电动机可以买带有减速器的,也可以用废旧玩具车的减速器自己安装。为有效利用空间电池盒可分两部分固定在电路板上下两面。然后用导线串联起来。其他结构件制作和安装可以充分发挥自己的想象创造自己的风格。最后可以给小车制作一个漂亮的外壳。
如图4,将玩具车减速器的输入轴拔掉,将电动机的输出轴插入原减速器输入轴位置,然后将电动机与减速器外壳固定好(可用强力胶粘接)。选择并截取适当长度的笔芯,将其一端与玩具车减速器的输出轴配合安装,另一端与车轮配合安装。然后将两组组装好的驱动轮对称地粘接在车架上。小车底部结构布置见图5。
万向轮装在小车尾部的中间,小车外売采用仿真木制模型的废料做成,将废掉的木片裁成适当长度材料,然后用白乳胶粘接而成。制作前最好先大概画个图,然后一边粘接一边修剪木料,以便得到适合的长度。小车外売完工图见图6。成品见图7。
调试
1将小车放在空白的纸上,打开电源并调节电位器17使蜂鸣器不鸣。
2.调节电位器12使小车正常前进,转向灯不亮。
3.调节电位器11使小车能1;fi直线行走。
4.将小车放在印有黑线的纸上,反复调节电位器12使小车在空白处正常前进且转向灯不亮,遇到黑线停止且转向灯亮。
5.将小车放在空白的纸上的障碍物前,反复调节电位器17使小车在没遇到障碍时正常行走且蜂鸣器不鸣叫,遇到障碍时停止且峰鸣器鸣叫。
6.重复3、4、5步壊直到小车能在固定轨道正常行走:能:沿既定軌道行走,转弯处相应转向灯亮,通到障碍时停止且蜂鸣器报警,障碍消除后又能正常行走。
-
基于MSP430的智能小车寻迹模块设计方案2013-09-30 14074
-
智能小车3路寻迹算法分析2011-07-11 12165
-
智能寻迹小车所有的资料哦2012-12-09 33547
-
怎么制作寻迹小车?2021-02-25 1545
-
基于stm32的智能小车设计方案2021-07-14 1952
-
基于摄像头和麦克纳姆轮的自主寻迹小车设计2021-08-26 2266
-
基于STM32单片机的蓝牙智能小车设计方案是什么2021-11-25 2314
-
智能小车的自动寻迹实验2009-03-06 4613
-
寻迹避障一体小车2015-11-13 1279
-
单片机的智能寻迹避障小车设计2016-03-14 1151
-
智能寻迹避障小车设计2016-07-21 1991
-
寻迹和避障智能小车系统设计_李志宜2017-01-19 1143
-
智能迷宫寻迹小车报告 (1)2017-02-28 857
-
寻迹智能小车的CAM设计资料合集2020-08-03 1129
-
基于stm32电磁型自动寻迹智能小车的设计,智能寻迹基于自动引导机器人系统2020-10-10 6746
全部0条评论

快来发表一下你的评论吧 !
