

汽车侧滑检测原理及实现数据快速采集系统的设计
汽车电子
描述
1、引言
汽车前轮侧滑量是机动车辆安全技术检测的重要指标。当汽车直线行驶时前轮的横向位移量称侧滑量,它是前轮定位参数在动态情况下匹配性能的综合反映,若侧滑量超出规定范围,不仅会磨损轮胎、增大油耗,还会因转向轮操纵不灵、汽车行驶不稳而导致事故的发生。传统的侧滑检测是通过自整角电机或电位计、差动变压器把滑动板的侧滑量转换成电信号传递给指针式显示装置,其缺点是测量值无法保存和打印,测量精度也不高。本设计采用电感调频式位移传感器,将侧滑量转换成数字频率信号直接送单片机处理,并可由单片机串口将侧滑数据传给上位机,使操作人员能方便地进行检测数据的误差修正、存储、统计和打印,因而克服了传统侧滑检测装置的各种局限性,提高了系统的测量精度和检测效率。
2、侧滑检测原理及系统结构
侧滑检测系统选用的电感调频式位移传感器其输出的信号频率与探头的位移呈线性关系,测试前,传感器探头调至中心位置,此时输出的频率称中心频率;测试时,汽车前轮驶过测试台,台上的滑板可向两侧滑动,滑板侧滑时,传感器探头随之位移,并输出相应频率,通过单片机不断检测传感器的输出频率,并将探头位移后的频率fi减去中心频率fo,再乘以转换系数K即得侧滑量,可用公式表示为:
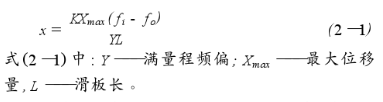
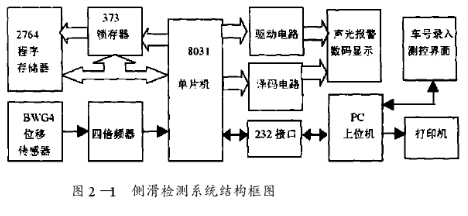
侧滑检测系统由上、下位机两部分组成,系统结构如图2—1所示。以单片机为核心构成的下位机集自动检测、判别、报警及数显于一体,配上单板侧滑台可独立完成侧滑检测任务;上位机因人机界面好、资源丰富,使系统便于对采集的数据进行分析、运算、存盘、打印和检测控制。
3、系统硬件设计
系统硬件主要包括位移传感器、倍频电路、显示报警电路、单片机、接口电路和PC机。
(1)位移传感器及倍频电路
位移传感器BWG4-10将传感探头与调频振荡器合装于一体,当磁性导杆(探头)在线圈中移动时,线圈电感量发生变化,从而改变振荡器的谐振频率,导杆外移,电感减小,频率上升;反之频率下降。由于线圈具有特殊结构,可保证输出信号的频率变化与导杆位移近似线性关系,所以传感器输出的方波调频信号无需A/D转换,可直接输入计算机处理,既简化了电路设计又减小了中间误差,提高了检测速度。
倍频电路由反相器、或非门及微分电路构成,通过对输入方波反相和前、后沿微分产生2个正脉冲,再经或非门合成实现二倍频,四倍频由2个二倍频电路级联获得。倍频数即式(2—1)中的转换系数,将传感器的变频信号倍频后送8031的P3.4口计数,可大大提高频率检测精度而不降低检测速度。
(2)单片机及显示报警电路
系统在执行数据采集程序时,将8031的T0、T1分别设计成16位的计数器和定时器,定时时间由软件设置,并通过程序控制单片机在T1的定时时间里使T0对输入的信号脉冲计数得到信号频率。系统在执行通信程序时,8031的T0、T1被重新设置,以提供通信所需的波特率。
侧滑数据从8031的P1.0~P1.3口以BCD码输出,并通过4511译码器译成七段数码送3位共阴数码管,8031的P1.4~P1.6输出位选信号控制数码管的阴极,实现动态扫描显示。内、外侧滑方向分别由2支发光二极管指示,其控制信号由P3.6、P3.7输出。8031的P1.7输出报警信号,控制发光管和带振荡器的蜂鸣器进行声光报警,为增强驱动能力,控制信号的输出均接在1413达林顿管上。
(3)接口电路及上位机
上、下位机之间的通信是利用各自的串口RXT与TXD信号的交叉连接来实现的。本设计采用新型的接口芯片MAX232完成电平转换,该电路只需外接4个电容就可在V+和V-上形成RS-232C所需要的正负电压,它可与单片机共用+5V电压源,从而大大简化了电路设计。
上位机采用VB编程,普通PC机均能满足系统要求,若有其他下位机需要控制,可对串口进行扩展。
4、系统软件设计
下位机软件用汇编语言编写,主要包括检测和通信程序、显示和中断程序;上位机软件含界面测控程序、通信程序和误差修正程序。
(1)检测、通信程序
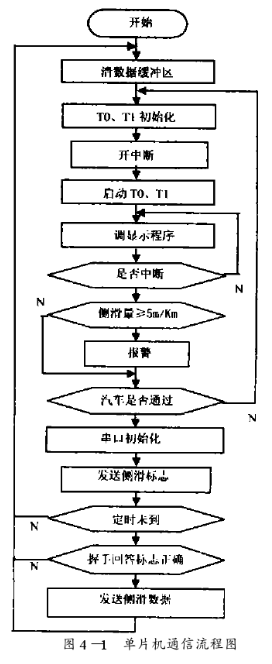
系统启动后先对数据存储单元清零,并使计数器开始计数,计数期间反复调用显示程序,当计数达到设定的时间后程序自动转入中断服务程序,对检测的数据进行处理,并判别是否给出报警信号,然后开始下一轮计数。
下位机平时处于数据采集状态,每次将采集的动态最大侧滑量和内外滑标志保存在单片机内数据缓冲区的两个存储单元中。当汽车通过滑板后,存储单元中的数据将不再变化,单片机通过检测存储单元中的数据变化情况判断汽车通过后,自动转入通信程序将检测数据传给上位机。为提高系统工作效率,通信采用中断与查询相结合的方式编程,单片
图4—1单片机通信流程图机先将内(外)滑标志作为握手信号传给上位机申请中断,并检测串口等待微机回答,若回答正确,则向上位机发送有效数据,若在一定时间内未收到上位机的正确回答,则清数据缓冲区,返回数据采集状态。单片机检测通信流程见图4—1。
(2)显示和中断程序
显示程序先将二进制数码转换成BCD码,然后分别将个、十、百位的数据送P1.6~P1.4口,使每位数据轮流显示600 s,同时给出测滑方向显示信号。
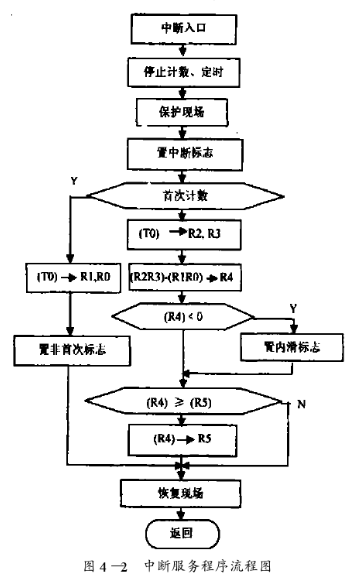
中断服务程序将复位后第一次得到的频率作为中心频率送入指定单元保存,其后每次测得的频率都与中心频率比较,结果大于零置外滑标志,否则置内滑标志,并将最大的比较结果送数据缓冲区保存。中断服务程序流程如图4—2所示。
(3)上位机的编程
在Windows环境下,上位机的操作系统完全接管了各种硬件资源,一般不允许用户直接控制串行口的中断管理。VB为用户提供了一个进行计算机串口通信管理的MScomm控件,该控件可实现串行通信的数据发送和接收,并对串口状态及串口通信的信息格式和协议进行设置。在发送或接收数据过程中,MScomm自动触发ONcomm事件,用户可通过编程访问CommEvent属性,了解通信事件的类型,并添加处理代码,进行串口的相关处理。根据单片机的数据传送方式,上位机接收侧滑标志后,先将其保存,再向下位机发送握手回答标志,并等待100 ms后取走串口输入缓冲器中的数据。
为提高检测精度,我们在上位机利用高级语言编程对位移的非线性误差进行了有效补偿。根据实验数据可得传感器输出频率与探头位移量的非线性关系曲线,从中点将该曲线分为两段,并采用“最小二乘法”求得两条拟合直线以替代非线性曲线,这样可使拟合误差进一步减小。程序由检测数据的内、外滑标志先判定那条拟合直线取代非线性曲线,然后按相应的直线方程求出补偿后的位移量x’,上位机误差处理流程如图4—3所示。
5、结束语
系统硬件设计实现了数据的快速采集,软件设计则保证了测量结果的高精度,系统的满量程离散误差和中心频率的随机误差可通过软件消除,量化误差可通过倍频技术而减小,传感器的非线性误差可控制在0.01 mm以下,频漂误差及动态误差可分别控制在0.003和0.05 mm/m以下,实验表明,系统总误差小于0.114 mm/m,完全满足侧滑仪设计要求。系统还可通过上位机设置相关程序参数,以适用于不同规格(0.5 m、0.8 m、1 m)的侧滑台。
责任编辑:gt
-
基于蓝牙通信的汽车检测系统的研究2009-05-17 3890
-
汽车ABS台架检测方法研究2009-12-02 4398
-
如何快速高效的完成汽车前盖板的三维检测?2017-08-11 4565
-
汽车常规温度的数据采集怎么实现?2019-08-15 1863
-
muivue-cli如何实现右上角的菜单侧滑遮盖在当前页面上?2020-06-04 1834
-
飞机迎角、侧滑角传感器图像检测系统的研制2009-07-01 681
-
滑油分析数据自动化采集技术研究2009-09-08 630
-
快速人脸检测系统的设计与实现2010-01-02 1236
-
汽车车轮侧滑量检测系统的设计2012-01-17 8601
-
基于ATmega16的汽车侧滑检测装置的设计2012-08-13 1312
-
基于LabVIEW数据采集系统的快速开发2016-01-20 726
-
快速实现采集施耐德PLC数据2021-08-20 3018
-
航顺车规级MCU HK32AUTO39A的汽车侧滑门控制方案2024-03-01 1179
-
基于航顺车规级MCU HK32AUTO39A的汽车侧滑门控制方案2024-03-19 1452
全部0条评论

快来发表一下你的评论吧 !
