

采用Matlab/Simulink软件实现永磁同步电动机控制系统的建模与仿真
工业控制
描述
1、引言
近年来,随着控制理论、永磁材料和电力电子技术的发展,基于磁场定向控制的永磁同步电动机(PMSM)以其优良的控制性能、高功率密度和高效率,广泛应用于各种高性能伺服系统及其他领域。本文对永磁同步电动机的磁场定向控制(FOC)系统进行了理论研究与分析,并运用Matlab/Simulink对其调速系统进行建模与仿真。
2、磁场定向控制
永磁同步伺服电动机的模型是一个多变量、非线性、强耦合系统。为了实现动态过程的矢量控制,首先要实现解耦。转子磁场定向控制是一种常用的解耦控制方法。
转子磁场定向控制实际上是将Odq同步旋转坐标系放在转子上,随转子同步旋转。其d轴(直轴)与转子的磁场方向重台(定向),q轴(交轴)逆时针超前d轴90°电角度,如图1所示。
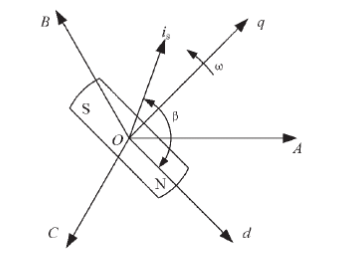
图l(图中转子的磁极对数为1)表示转子磁场定向后,定子三相不动坐标系A、B、c与转子同步旋转坐标系Odq的位置关系。定子电流矢量is在Odq坐标系上的投影id、iq可以通过对iA、iB、iC的Clarke变换(3/2变换)和Park变换(交/直变换)求得,因此id、iq是直流量。
三相永磁同步伺服电动机的转矩方程为:
式中,ψd、ψq——定子磁链在d、q轴的分量;
ψf——转子磁钢在定子上的耦合磁链,它只在d轴上存在;
p——转子的磁极对数;
Ld、Lq——永磁同步电动机d、q轴的主电感。
式(1)说明转矩由两项组成,括号中的第一项是由三相旋转磁场和永磁磁场相互作用所产生的电磁转矩;第二项是由凸极效应引起的磁阻转矩。
对于嵌入式转子,Ld《Lq,电磁转矩和磁阻转矩同时存在。可以灵活有效地利用这个磁阻转矩,通过调整和控制β角,用最小的电流幅值来获得最大的输出转矩。对于凸极式转子,Ld=Lq,因此只存在电磁转矩,而不存在磁阻转矩。转矩方程变为:

由式(2)可以明显看出,当三相合成的电流矢量is与d轴的夹角β等于90°时可以获得最大转矩,也就是说is与q轴重合时转矩最大。这时,id=iscosβ=0;iq=issinβ=is。式(2)可以改写为:

由于是永磁转子,ψf是一个不变的值,所以式(3)说明只要保持is与d轴垂直,就以像直流电动机控制那样,通过调整直流量iq来控制转矩,从而实现三相永磁同步伺服电动机的控制参数的解耦。
3、 调速系统的控制方案
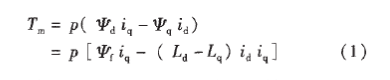
采用磁场定向控制方法的永磁同步电动机的电磁转矩严格与定子电流幅值成正比,为了得到合适的电磁转矩,需要精确控制定子电流幅值的大小。永磁同步电动机调速控制系统原理如图2所示。
永磁同步电动机磁场定向控制的速度控制过程可简单描述如下:
首先,根据检测到的电动机转速和输入的参考转速及转速与转矩的关系,通过速度PI控制器计算得到定子电流参考输入iSqref。定子相电流ia和ib通过相电流检测电路被提取出来,然后用Clarke变换将它们转换到定子两相坐标系中,使用Park变换再将它们转换到d-q旋转坐标系中。d-q坐标系中的电流信号再与它们的参考输入iSqref和iSdref相比较,其中iSdref=O,通过PI控制器获得理想的控制量。控制信号再进行Park逆变换,送到PWM逆变器,从而得到控制定子三相对称绕组的实际电流。外环速度环产生了定子电流的参考值,内环电流环得到实际控制信号,从而构成一个完整的速度FOC双闭环系统。
4、 速度控制系统的仿真
4.1 系统仿真模型的建立
在Matlab7.2的Simulink环境下,利用SimPow-erSystem Toolbox2.3丰富的模块库,建立PMSM控制系统仿真模型。
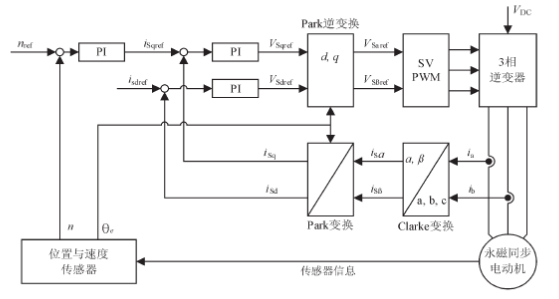
PMSM的FOC系统采用双闭环控制方案:外环为转速环,由PID调节器构成;内环是电流环,采用的是矢量控制。根据模块化的思想,将控制系统分割为各个功能独立的子模块。其中主要包括:PMSM数学模型、矢量控制模块、坐标变换模块、电流以及转速PID控制模块。PMSM的FOC数字仿真模型如图3所示。
4.2 仿真结果及分析
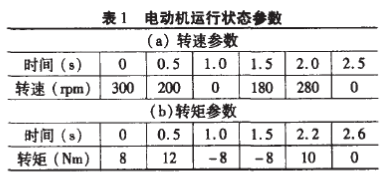
PMSM状态参数设置如表1所示。
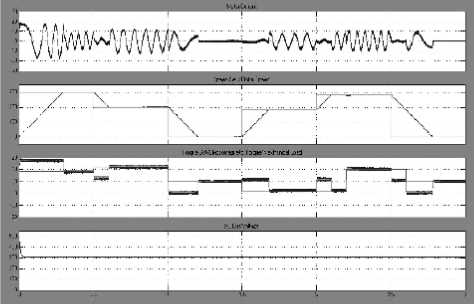
仿真结果曲线如图4所示,图中横轴为时间,纵轴自上而下分别为定子电流、转速设定/转子转速、转矩设定/电磁转矩/机械转矩、直流母线电压。
从永磁同步电动机FOC数字仿真结果可以得出以下结论:
(1)电机在启动阶段,转速保持稳定加速状态。当达到设定速度时,转速基本保持平稳,波动较小;
(2)由于采用了闭环控制结构,负载转矩的变化所引起的扰动得到有效的补偿,因此转速保持稳定;
(3)直流母线电压只在启动时有一定的脉冲,在调速过程中均保持平稳态势;
(4)定子驱动电流的频率和幅值的调制由FOC/SVPWM实现,基本满足调速性能指标要求。
5 、结束语
在Matlab/Simulink的可视化编程环境下,数字仿真PMSM速度控制系统,证明了基于FOC的电流、速度双闭环SVP-WM的控制性能优良。
责任编辑:gt
-
稀土永磁同步电动机失磁对电机损耗的影响2025-07-15 474
-
永磁同步电动机的工作原理 永磁同步电动机的控制方法2024-02-02 3410
-
永磁同步电动机的工作原理 永磁同步电动机的优点有2024-01-19 2312
-
自控式同步电动机2021-08-27 2086
-
matlab机电系统仿真案例2021-07-12 1495
-
【下载】《永磁同步电动机直接转矩控制系统》胡育文 ——介绍三类PMSM直接转矩控制技术2019-12-03 4568
-
永磁同步电动机的发展趋势如何?2019-10-10 2796
-
一文阐述永磁同步电动机的综合效益2018-10-17 2571
-
基于SVPWM的永磁同步电动机控制系统设计2016-04-18 566
-
基于模糊PID的永磁同步电动机数字控制系统2016-04-05 1078
-
永磁同步电动机的分类和特点2014-01-22 20715
-
基于矢量控制的永磁同步电动机回馈制动仿真2011-08-15 1660
-
永磁同步电动机无位置传感器直接转矩控制仿真研究2009-09-14 465
全部0条评论

快来发表一下你的评论吧 !
