

采用极点配置法实现倒立摆系统的设计
电子说
描述
1 引言
倒立摆是研究控制理论的典型实验平台。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定,并且可以承受一定的干扰,采用极点配置法设计用于直线型一级倒立摆系统的控制器。
2 数学模型的建立
因为倒立摆系统本身是一个自不稳定的系统,因此实验建模存在一定的困难。然而,经过谨慎的假设,忽略掉一些次要因素,就能使倒立摆系统成为一个典型的运动的刚体系统,使之在惯性坐标系内应用经典力学理论就能建立系统的动力学方程。下面采用牛顿一欧拉方法建立直线型一级倒立摆系统的数学模型。
2.1 微分方程的推导
在忽略空气阻力和各种摩擦后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图l所示。
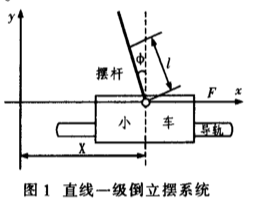
假设M为小车质量;m为摆杆质量;b为小车摩擦系数;
l为摆杆转动轴心到杆质心的长度;I为摆杆惯量:F为加在小车上的力;x为小车位置;φ为摆杆与垂直向上方向的夹角;
θ摆杆与垂直向下方向的夹角图2示出系统中小车和摆杆的受力分析图。其中,N和P为小车与摆杆相互作用力的水平和垂直方向分量脚。值得注意的是:在实际倒立摆系统中检测和执行装置的正负方向已确定,因而矢量方向定义如图2所示,图示方向为矢量正方向。
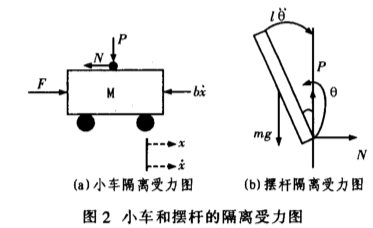
分析小车水平方向所受的合力,可得方程为:
MX=F—bi—N
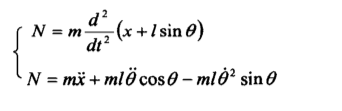
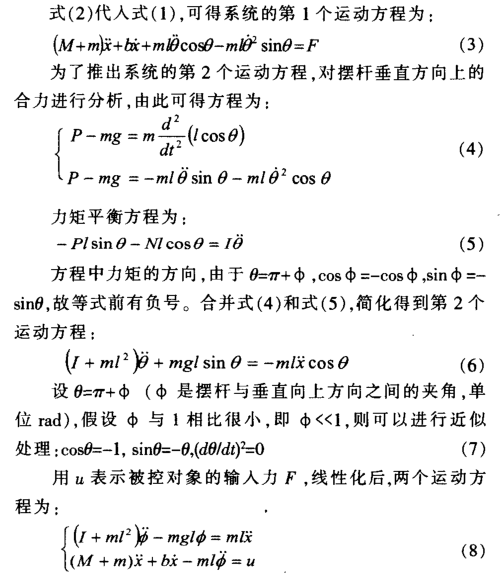
由摆杆水平方向的受力进行分析,可得:
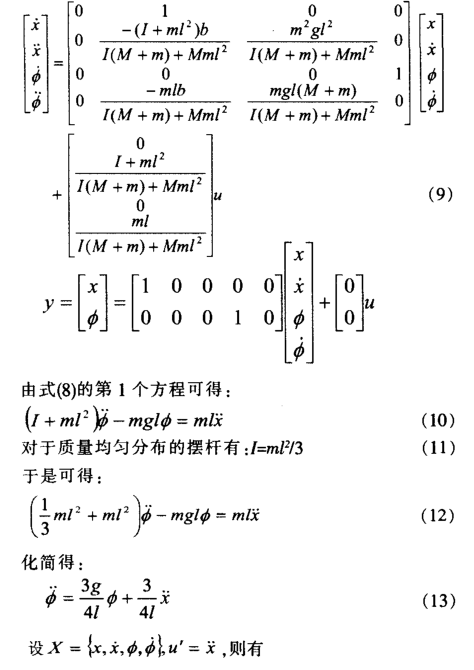
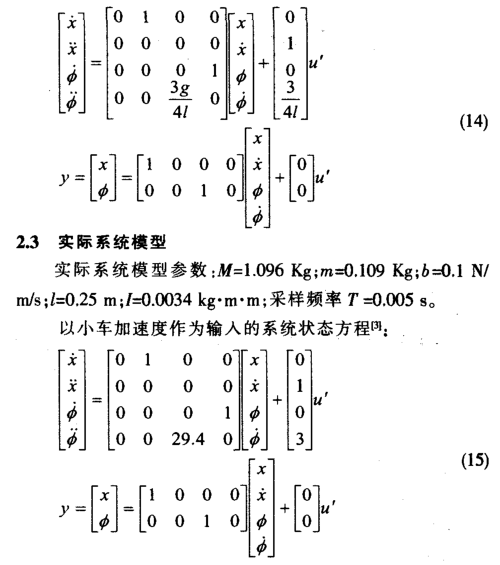
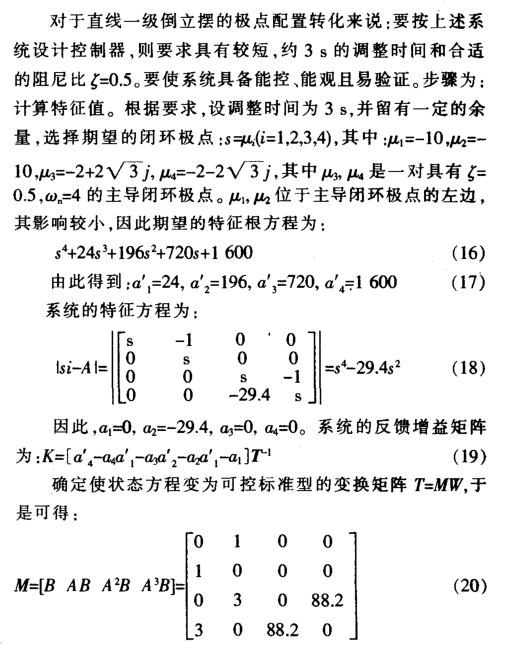
2.2 状态空间方程
由方程组(8)对x,φ解代数方程,整理后得:
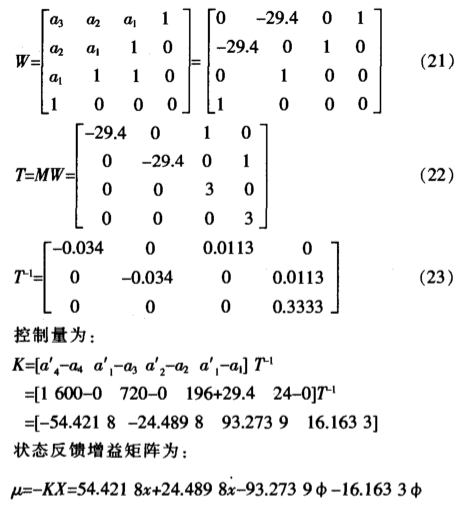
3、 状态空间极点配置
4 、仿真验证
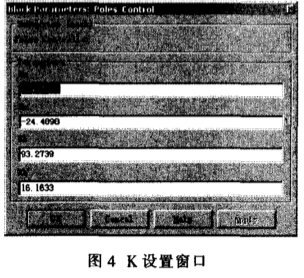
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的设置窗口。
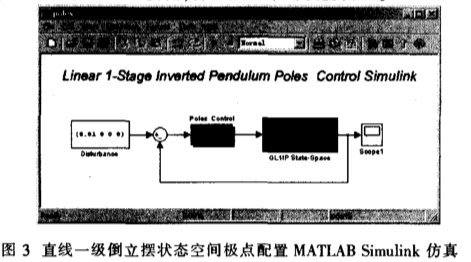
把计算得到的K值输入到上面的窗口。可得图4所示的仿真运行结果。
由图5可见,在存在干扰的情况下,系统在3 s内基本上可以恢复到新的平衡位置。
5、 实时控制
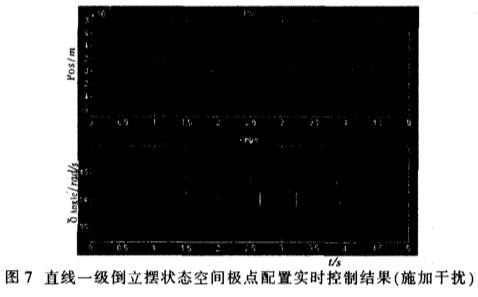
将仿真得到的K参数输入到实际系统的控制模块中,可得图6所示实时控制曲线。在给定倒立摆干扰后,系统响应图7所示。
6、 结语
采用极点配置法设计的用于直线型一级倒立摆系统的控制器,可使系统在很小的振动范围内保持平衡,小车振动幅值约为4×10-3m,摆杆振动幅值约0.05 rad,系统稳定时间约3 s。
责任编辑:gt
-
倒立摆该如何去实现呢2021-12-23 1834
-
关于倒立摆的问题描述2021-09-07 1394
-
倒立摆系统简介2021-09-01 1530
-
采用16位结构的微控制器实现二级倒立摆系统的设计2020-05-03 2319
-
倒立摆是什么_倒立摆有什么用2017-11-27 59167
-
倒立摆控制系统的原理及其应用介绍2017-10-19 9603
-
【IntoRobot Neutron试用体验】使用Neutron实现倒立摆的初步倒立2017-06-29 3043
-
简易环形倒立摆控制系统的设计实现2016-08-23 1094
-
倒立摆系统的智能控制算法研究2012-08-29 1218
-
倒立摆系统的自摆起和稳定控制2012-01-18 1579
-
倒立摆的非线性稳定控制实现2011-07-06 883
-
环形倒立摆2011-04-05 1762
-
基于状态反馈控制的倒立摆系统分析和设计2010-12-17 923
-
基于单片机实现对二级倒立摆的控制2009-06-26 834
全部0条评论

快来发表一下你的评论吧 !
