

基于西门子BS-RWB型变送器实现齿轮箱加载实验温度模糊控制器的设计
工业控制
描述
引言
齿轮箱加载实验是齿轮箱出厂前保证产品质量的必备工序,即保持齿轮箱油温高温下(100℃)使齿轮箱带负荷运行,达到检验齿轮箱性能的目的。传统PID调节器的设计建立在精准数学模型上,由于实际油温控制系统存在大惯性滞后环节,而且随着实验的进行油的成份会发生变化,导致惯性时间常数变化。另外,齿轮箱加载与不加载,会导致整个温控系统参数变化较大,难以建立系统的精准数学模型。而模糊控制的设计建立在操作者的实际控制经验上,不依赖精准的数学模型。故对基于模糊技术的齿轮箱加载实验油温调节系统进行设计。
1、硬件设计
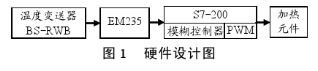
系统硬件设计如图1。其温度变送器选用西门子BS-RWB型变送器,其测量温度-50~150℃、输出电流4~20mA。EM235模拟量模块可将0~20mA的电流转化成0~32000的整数,以实现对温度的测量。S7-200是西门子PLC,有PWM输出功能。根据给定温度和测量温度的偏差,经模糊控制器得出PWM占空比,控制固态继电器的通断,从而控制加热元件达到温度自动调节的目的。PWM是脉宽调制,控制量的输出是一个采样周期的脉冲宽度,脉宽越宽,控制量越大,加热元件发热越厉害,温度越高。硬件采用模块化设计可靠程度高。
2、 温度模糊控制器的设计
2.1 模糊化
1)观测量模糊化
用给定温度与测量温度的偏差作为观测量x∈X,X为论域:X={3,-2,-1,0,1,2,3}。
记温度模糊观测量为5个模糊集合PBx(正大)、PSx(正小)、0x(零)、NSx(负小)、NBx(负大),它们的隶属函数如表1。

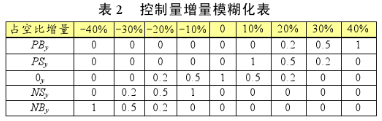
2)控制量增量模糊化
控制量增量模糊化用PWM占空比增量y∈Y表示,Y为论域:
Y={-40%,-30%,-20%,-10%,0,10%,20%,30%,40%}
与观测量类似,也采用等级来描述控制量。记占空比增量为5个模糊集合PBy(正大)、PSy(正小)、0y(零),NSy(负小)、NBy(负大),其隶属函数如表2。采样周期的单位通常为秒,周期占空比增量以百分数的形式表示。
2.2 建立模糊控制规则一,构造模糊关系矩阵
根据实际经验温度偏差正大,需增加PWM占空比正大,温度偏差正小,需增加PWM占空比正小,得出模糊控制规则如表3。
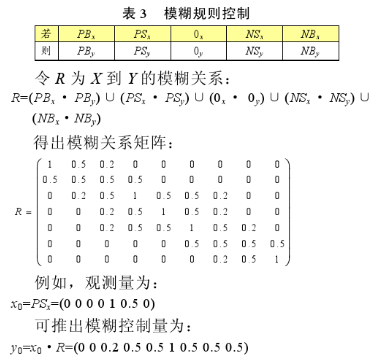
2.3 模糊判决
采用最大隶属原则:
y0={(-40%,0),(-30%,0),(-20%,0.2),(-10%,0.5),(0%,0.5),(10%,1),(20%,0.5),(30%,0.5),(40%,0.5)}
故确切的响应是PWM的占空比增加10%。
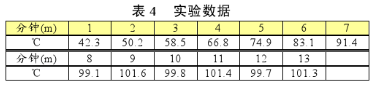
3 、测试结果
在采样周期是5s的情况下,从室温38℃加热到100℃的数据,如表4。
在100℃油温下齿轮箱转速从0 r/min上升到2400r/min的数据,如表5。

测试表明系统运行稳定,超调量较小,满足齿轮箱加载实验温度控制的要求。
4 、结束语
该温度模糊控制器的设计步骤简单、调试方便、通用性强,在工程实践中有好的使用价值。
责任编辑:gt
-
基于无线技术的齿轮箱温度在线监测系统2023-08-25 1721
-
LabVIEW在齿轮箱故障诊断中的应用2023-12-25 4133
-
一种基于无线技术的齿轮箱温度监测系统设计介绍2019-07-17 3417
-
PLC温度控制技术(西门子)2016-01-12 1133
-
基于西门子S7_300PLC的模糊控制实现_瞿枫2017-02-07 1098
-
基于西门子船舶齿轮箱MARINE GEARBOXES介绍2017-10-27 1590
-
基于AT89C2051单片机和红外无线实现齿轮箱温度在线监测系统的设计2020-12-31 3159
-
探讨直交轴齿轮箱的分类和应用2021-06-27 4190
-
微型齿轮箱的维护细节2021-12-16 1859
-
减速齿轮箱的选型2021-12-22 2755
-
行星齿轮箱的特点2022-01-08 2699
-
虹科方案 | 基于Profinet网络的风力发电机组齿轮箱温度采集系统2022-04-22 1676
-
解析齿轮箱马达:效能与应用2024-02-02 1841
-
西门子PLC与伺服控制器如何通讯2024-06-14 6877
-
西门子plc温度模块怎么编程2024-07-25 5191
全部0条评论

快来发表一下你的评论吧 !
