

KUKA机器人电伺服焊钳力的建立过程
描述
KUKA机器人组态电伺服焊钳,使用软件插件 "SERVOGUN.BASIC"
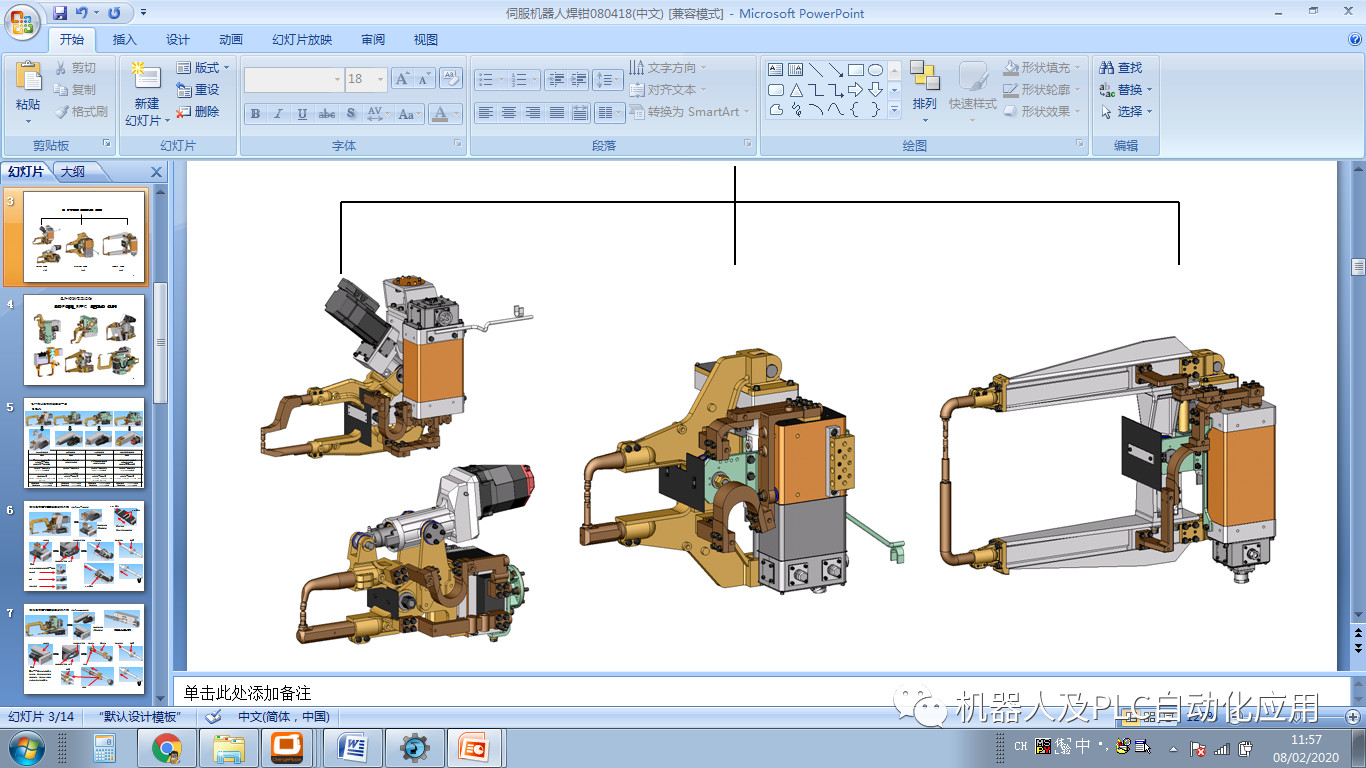
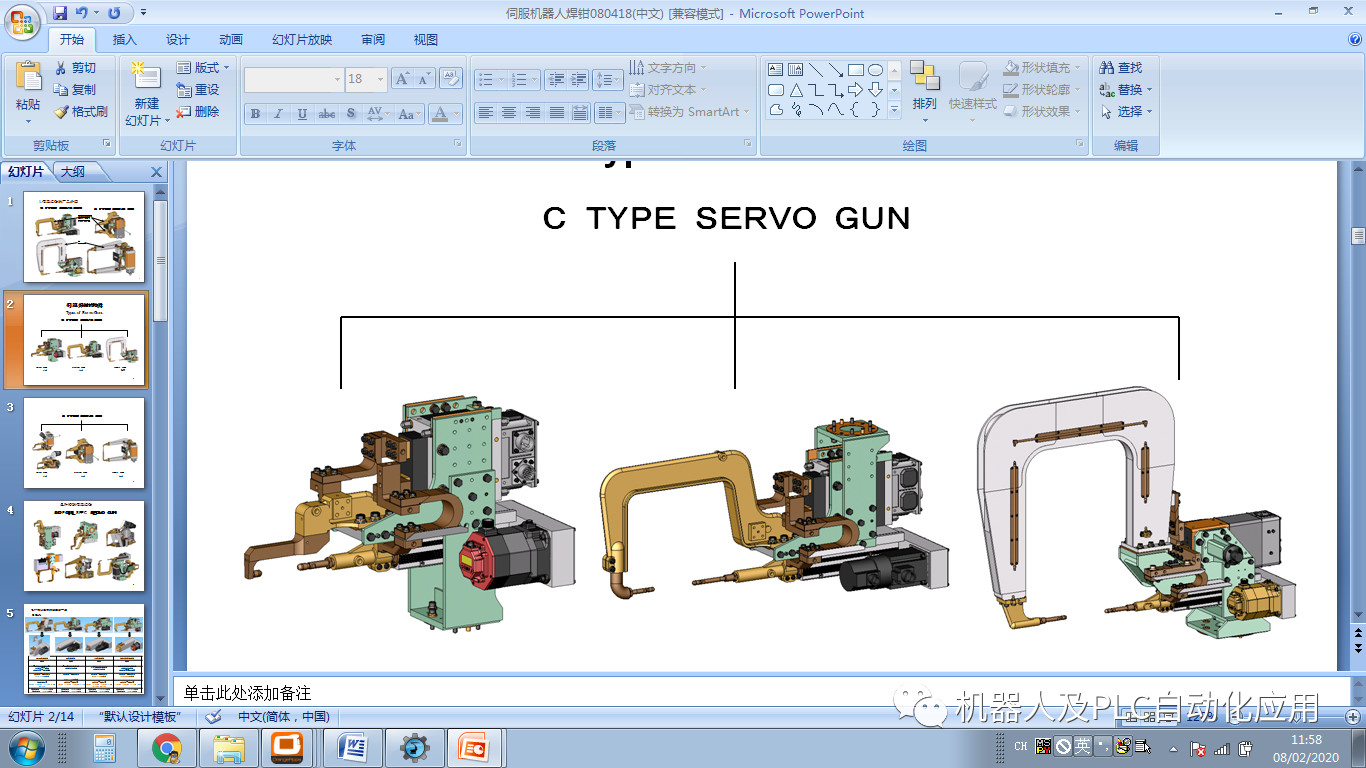
电机驱动简图:
X型焊钳
C型焊钳
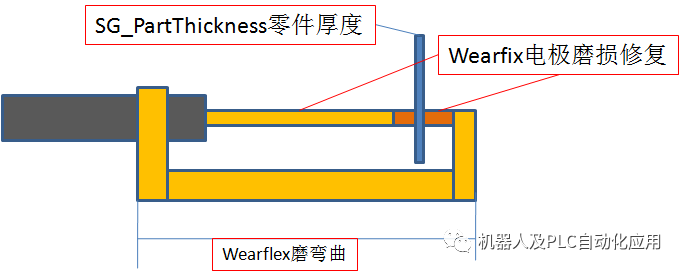
KUKA机器人常用控制变量:
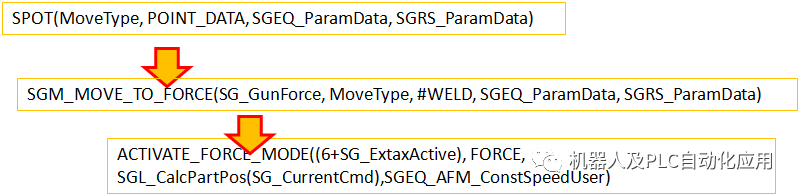
KUKA机器人控制力函数:
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)

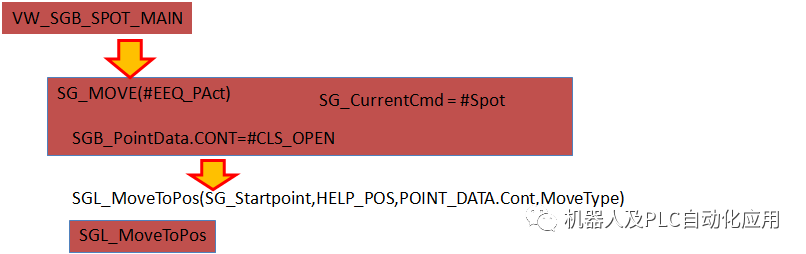
力的建立确定过程:
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P ; 焊接点
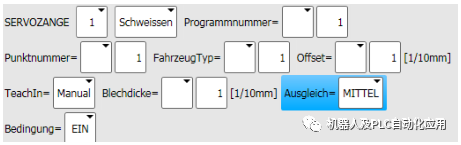
SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnummer= 5154 FahrzeugTyp= 60 Offset= 1[1/10mm] TeachIn= Auto Ausgleich= MITTEL Bedingung=EIN USER焊接程序
VW_SGB_SPOT_MAIN(TRUE,#SG_PTP,P10,1,99,5154,60,1,TRUE,0,ServoGun[1].CompType,#MEDIUM,0,0,0) 执行后台焊接程序
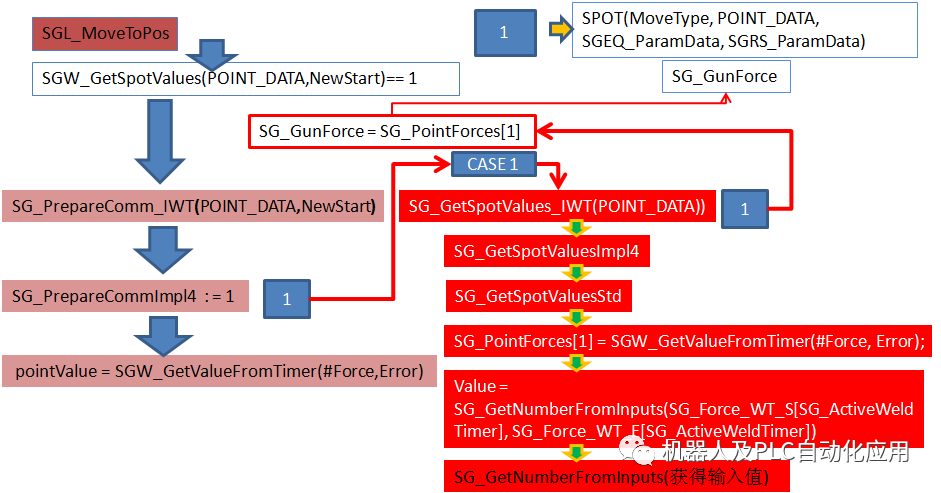
机器人的焊接控制器的通讯连接力的输入点
SG_Force_WT_S[1]=793 起始字节
SG_Force_WT_E[1]=800 结束字节
SG_GunForce= SG_PointForces[1] 传递力值
将工作力值给入系统函数 'ACTIVATE_FORCE_MODE'中实现力的控制
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3894
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1841
-
KUKA机器人电伺服焊钳力的建立过程V2.282023-03-02 1285
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 2029
-
KUKA机器人组态电伺服焊钳应用2022-09-20 1234
-
KUKA机器人伺服驱动模块维修2021-09-17 1892
-
KUKA机器人焊钳铣削清零方式2021-06-18 4422
-
简单介绍KUKA外部轴应用2020-10-27 3382
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8023
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10923
-
KUKA机器人问题解答2019-07-15 2628
-
机器人焊接技术在车身焊接工艺的应用2017-09-12 4515
-
KUKA重型机器人2015-02-03 8325
全部0条评论

快来发表一下你的评论吧 !
