

电伺服焊接控制器握手程序用法分析
描述
适用版本KUKA 8.3系统
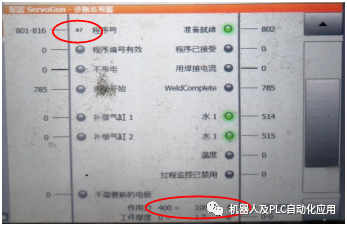
用于电伺服焊钳在调用程序前的自我检查与焊接控制器的通讯,即我给你程序序号调用91焊程序后,焊接控制器给力值400到机器人机器人反馈给焊接控制400的IO信号。用以判断通讯的好坏,数值传输的准确性,起到监控的作用!
接口故障,会触发A789(重置步进触点错误)进行故障复位,重新进行连接,连接后才能进行焊接程序的发出。
下面让我们详细分析一下:
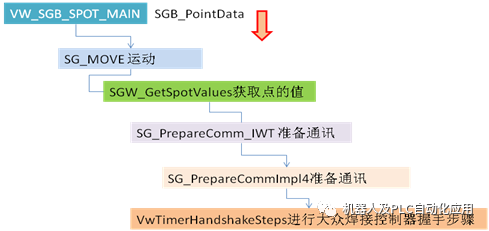
在轨迹预执行中调用,判断通讯连接情况。
在轨迹点处再次进行判断调用。

SG_CheckProgNum_WT[1]:91有效检查程序号
每次焊接都要用到的握手程序91,BOSCH力值是400
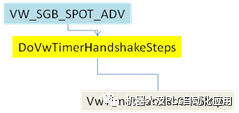
大众焊接控制器握手步骤传送程序号
VwTimerHandshakeSteps(PrepCommStep, Point_DATA, timeOutextension)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
恒功率脉冲焊接控制器的创新应用与优势分析2024-12-19 1099
-
恒流恒压焊接控制器的精准应用与优势分析2024-12-17 1292
-
伺服控制器的常见故障及解决方法2024-06-20 5749
-
伺服控制器的工作原理和基本结构2024-06-13 4863
-
伺服控制器编码器反馈数值为负数怎么回事2024-06-05 6461
-
Bosch 手动焊接控制器的急停回路设计2023-06-26 1074
-
伺服控制器是什么_伺服控制器用途2023-03-12 7904
-
伺服控制器工作原理_伺服控制器选型要考虑问题2023-03-09 2707
-
蓝牙伺服控制器2022-07-04 1350
-
一文详解伺服电机与伺服控制器2020-09-24 15854
-
气动伺服DSP控制器研究2018-01-30 921
全部0条评论

快来发表一下你的评论吧 !
