

抓手USER:TECH2_ Koll_Ueb 过载报警设置
描述
功能:--力矩报警--
例:
TECH2_ Koll_Ueb Betriebsart =Lernen Stop Bereich = 1 Offset = 5 EIN
------------
VW_USR_R (#USR_ADV,204,1,2,1,5,1,2,TRUE)
P1=1 P1=1 测量力矩 P1=2 -激活使用力矩监控
P2=2改变个轴的力矩范围
P3=1使用的数组
P4=5偏差补偿值
P5=1
P6=2
P7=TRUE
ADC : 预先执行
CASE 204
IF(PAR7==TRUE)THEN
WHILE((PAR4<1) OR (PAR4>40)) --检查P4的补偿值-是否在(1-40)之间
MLD(29,#QuitMsg);
ENDWHILE
ENDIF
MAIN: 到达位置后停止
CASE 204 ;
Index=PAR3 -P3=1使用的数组
KOLL_DAT[1]={A1 8,A2 19,A315,A4 9,A5 12,A6 13}
IF(PAR7==TRUE)THEN
WHILE(PAR2<1) OR (PAR2>2) -检查P2值得设置范围
MLD(30,#QuitMsg)
ENDWHILE
;
SWITCH PAR1 -P1=1
CASE 1
IF PAR2==1 THEN - P2 =1 初始化力矩值得范围-
FOR i=1 to 6
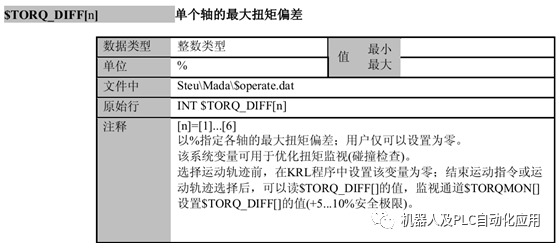
$TORQ_DIFF[i]=0
ENDFOR
Koll_dat[Index].A1=0
Koll_dat[Index].A2=0
Koll_dat[Index].A3=0
Koll_dat[Index].A4=0
Koll_dat[Index].A5=0
Koll_dat[Index].A6=0
ENDIF
IF PAR2==2 THEN 改变个轴的力矩范围
IF($TORQ_DIFF[1])>(Koll_dat[Index].A1)THEN
$TORQ_DIFF[1] A1轴的最大扭矩偏差
Koll_dat[Index].A1=$TORQ_DIFF[1]+PAR4 算出新的A1轴的力矩
ENDIF
IF($TORQ_DIFF[2])>(Koll_dat[Index].A2)THEN
$TORQ_DIFF[2] A2轴的最大扭矩偏差
Koll_dat[Index].A2=$TORQ_DIFF[2]+PAR4
ENDIF
IF($TORQ_DIFF[3])>(Koll_dat[Index].A3)THEN
Koll_dat[Index].A3=$TORQ_DIFF[3]+PAR4
ENDIF
IF($TORQ_DIFF[4])>(Koll_dat[Index].A4)THEN
Koll_dat[Index].A4=$TORQ_DIFF[4]+PAR4
ENDIF
IF($TORQ_DIFF[5])>(Koll_dat[Index].A5)THEN
Koll_dat[Index].A5=$TORQ_DIFF[5]+PAR4
ENDIF
IF($TORQ_DIFF[6])>(Koll_dat[Index].A6)THEN
Koll_dat[Index].A6=$TORQ_DIFF[6]+PAR4
ENDIF
ENDIF
CASE 2 P1=2 -激活使用力矩监控-
IF PAR2==1 THEN P2=1 使用原有参数改变程序模式时的力矩监控范围-
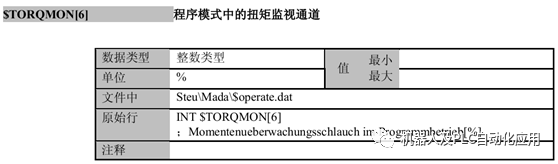
$TORQMON[1]=Koll_dat[Index].A1
-$TORQMON[1]程序模式中对1轴的力矩监控范围通道-
$TORQMON[2]=Koll_dat[Index].A2
$TORQMON[3]=Koll_dat[Index].A3
$TORQMON[4]=Koll_dat[Index].A4
$TORQMON[5]=Koll_dat[Index].A5
$TORQMON[6]=Koll_dat[Index].A6
ENDIF
IF PAR2==2 THEN P2=2 直接给力矩监控范围为200
FOR i=1 to 6
$TORQMON[i]=(200-KOLL_RED) -KOLL_RED=0
ENDFOR
ENDIF
DEFAULT
MLD(20,#QuitMsg) -如果P1等于除了1和2 的其他值提示错误-
ENDSWITCH
ENDIF
-------------------------------------------------
常用力矩变量:
-
HI-TECH PICC-18 Compiler PL22006-03-25 1257
-
漏电防火报警系统中连续过载电流调度算法的实现2011-12-20 1363
-
电机过载的原因及解决方法2019-07-31 98205
-
电机保护器显示过载2019-08-05 10658
-
变频器和电动机过载系数设置2020-03-15 25199
-
可燃气体报警器的报警值该如何设置2021-01-14 21694
-
基于SP6650UEB直流到直流单输出电源的2021-09-08 549
-
基于SP6644UEB直流到直流单输出电源的2021-09-09 588
-
VASS-KUKA机器人力矩监控TECH2_ Koll_Ueb变量的控制使用简介2023-01-30 2388
-
变频器过载的原因及处理 变频器过载怎么处理设置参数2023-03-27 34033
-
浅析机器人定位抓手的使用原则2023-10-31 1518
-
如何使用PLC实现过载报警控制2024-01-02 7228
-
伺服过载报警调什么参数好2024-06-06 6195
-
伺服驱动器一上电就报过载解决方法及具体案例2024-06-23 14571
-
MADDT1205A21驱动器的过载保护阈值如何设置?2025-10-25 1122
全部0条评论

快来发表一下你的评论吧 !
