

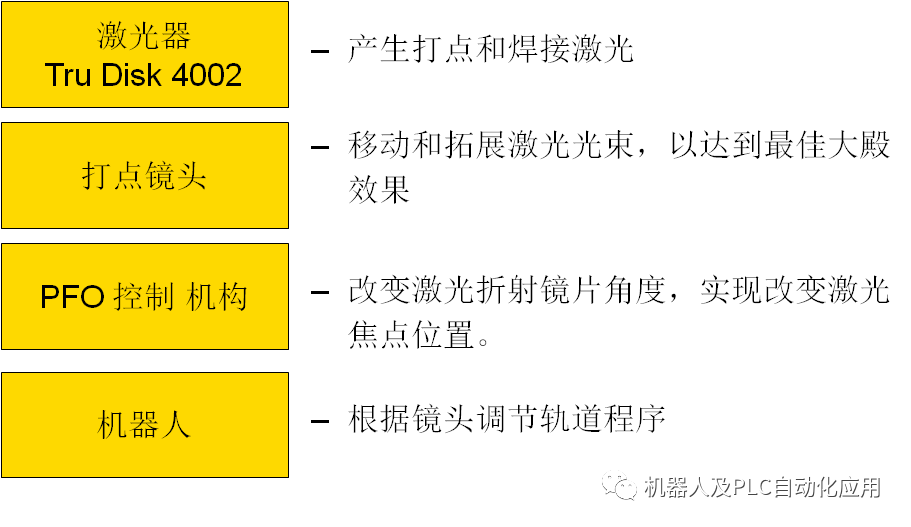
PFO飞行热熔激光焊接
描述
PFO飞行热熔激光焊接
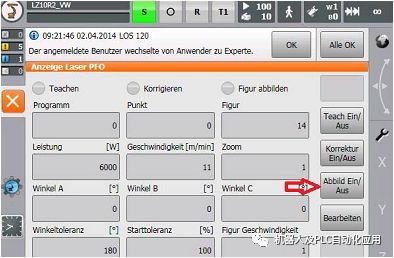
控制示意图:
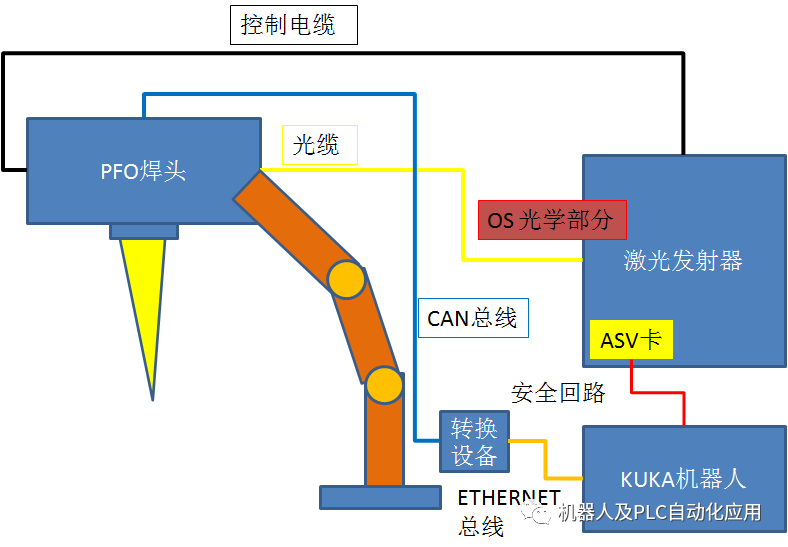
机器人使用插件:
PFODRIVER 插件
ECAT_SYS_X44插件
机器人CCU版接口X44:Ethernet总线地址:172.20.3.3
转换器设备的设备EtherNET总线地址:172.20.3.99
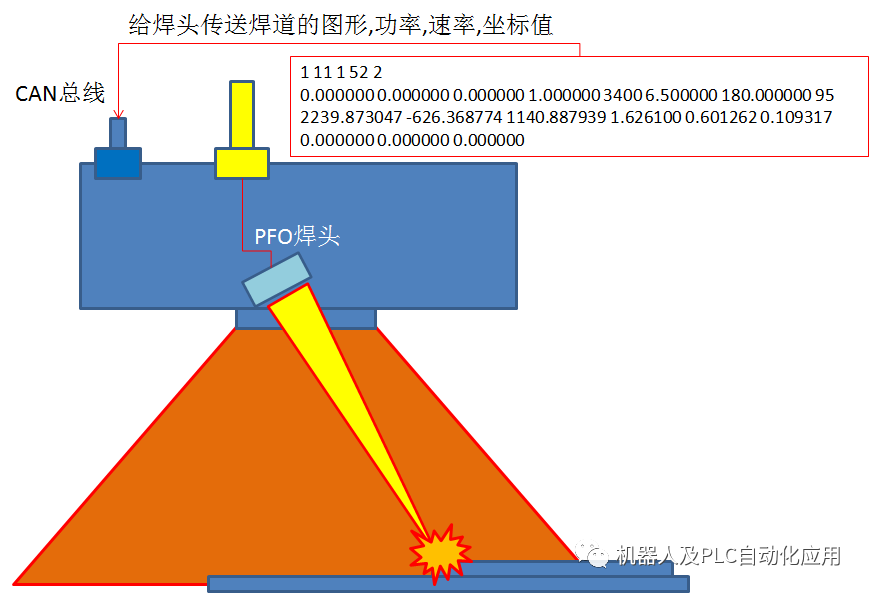
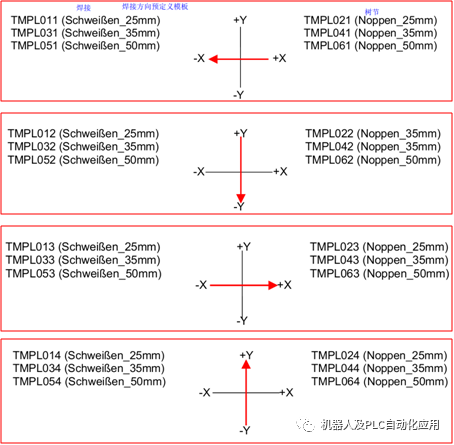
固定图形的长度和方向用不同的图像号来代替
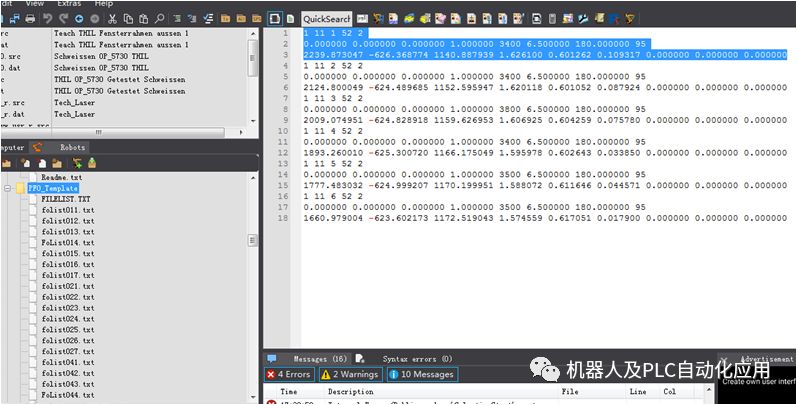
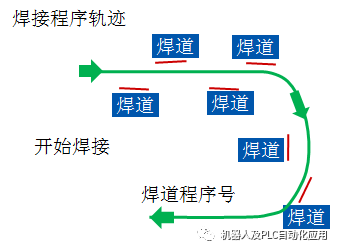
焊道位置示教程序分析
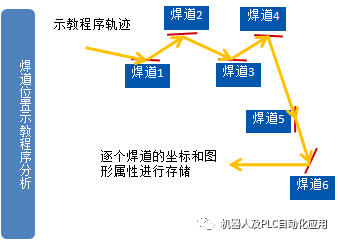
1.机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
使用软件库中的标准图形的用户程序

2: VW_PFO VIRT_PUNKT Programm=14 Punkt=7 Betriebsart =fahre ZIRK Auftrag = Teach Template Rampe = Ende
使用圆弧进行焊接
2: VW_PFO VIRT_PUNKT Programm=14 Punkt=8 Betriebsart =fahre PTP Auftrag = Teach Template Rampe = AUS
使用PTP点到点进行焊接
3: VW_PFO VIRT_PUNKT Programm=56 Punk t=2 Betriebsart =fahre LIN Auftrag = Teach Template Rampe = AUS
使用LIN点到点进行焊接
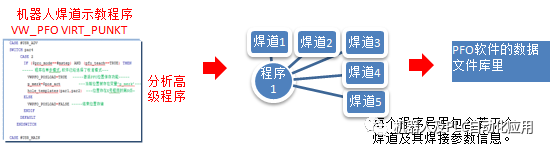
焊接程序分析
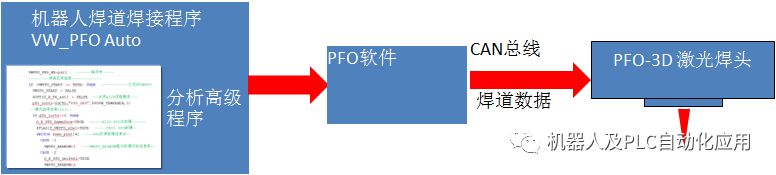
2.机器人在执行飞行焊接程序时,通过KUKA 用户程序调用焊道的程序号,给PFO软件,然后PFO软件将此程序号里激活的所有焊道及其数据都通过CAN总线发送给PFO焊头,焊头对此程序号内所有焊道逐一进行焊接。

-
激光焊接工艺有哪些?2024-10-12 13240
-
激光焊接原理2016-03-11 3516
-
激光焊接的优点2016-03-14 4401
-
激光塑料焊接技术的流程和方法2018-09-10 4092
-
激光焊接机是如何进行焊接的呢?2020-05-09 2617
-
激光焊接的发展领域以及激光焊接相关知识的介绍2020-12-22 5764
-
超声波塑料焊接的导熔与预热原理2021-07-29 2748
-
激光飞行焊接技术的优点介绍2022-07-18 3168
-
高速激光熔覆相较于常规激光熔覆的优缺点有哪些2022-11-22 2646
-
激光焊接技术在焊接金属扇叶的工艺优势2023-02-15 724
-
内壁激光熔覆技术的优点及应用2023-03-21 1334
-
激光熔覆的主要工艺参数(CRT激光焊接系统)2021-10-28 5814
-
GH3030高温合金激光焊接是什么2022-12-16 1129
-
塑料焊接机熔深对激光焊接质量有什么影响2024-06-04 1062
-
激光焊接技术在焊接医疗热活检钳的工艺应用2024-08-15 852
全部0条评论

快来发表一下你的评论吧 !
