

基于单片机和PWM控制方法调速实现无刷控制器检测设计
工业控制
描述
引言
伴随着城市化进程,人们生活的交通距离不断扩大,代替燃油汽车和自行车的电动车的普及大幅度的提高了电力资源的利用效率,促进了国民经济的健康发展。电动自行车以电力作动力,骑行中不产生污染,无损于空气质量。从改善人们的出行方式、保护环境和经济条件许可情况等因素综合来看,电动自行车目前乃至今后都有着广阔的发展空间。电动自行车所用直流电机分为有刷电机和无刷电机两种。其中有刷电机控制较简单。但其易磨损的电刷带来维修保养工作量相对较大、使用寿命相对较短等缺点。而直流无刷电机本身没有易磨损部件,电机寿命长,维修保养工作量小。但直流无刷电机采用电子换向原理工作,其控制过程比有刷电机复杂得多,因此对控制器质量的要求也高得多。
目前电动自行车采用的直流无刷电机都是三相电机,电角度有60°和120°两种。电机极数大部分为18极,也有16极、20极等。控制器根据霍尔反馈的电机电极位置,控制相应的功率驱动管的开通或关断,在定子中产生旋转磁场,驱动电机的转子转动。
为了判断无刷控制器是否能够正常运行,也就是检测转把和刹车功能是否正常,判断控制器的角度是60°还是120°,并且确定绕组A,B,C相与位置信号a,b,c之间的对应关系,正确地将控制器与电机进行连接,现在很多的检测仪器都采用模拟电路,使得结果不是很精确,而且需要的电路也很复杂,成本很大。设计采用STCl2C5410AD单片机作为控制芯片,大大简化了硬件电路,以软件编程来实现。
1、电动车无刷电机控制器简介
控制器由周边器件和主芯片(或单片机)组成。周边器件是一些功能器件,如执行、采样等,它们是电阻、传感器、桥式开关电路,以及辅助单片机或专用集成电路完成控制过程的器件;单片机也称微控制器,是在一块集成片上把存贮器、有变换信号语言的译码器、锯齿波发生器和脉宽调制功能电路以及能使开关电路功率管导通或截止、通过方波控制功率管的的导通时间以控制电机转速的驱动电路、输入输出端口等集成在一起,而构成的计算机片。这就是电动自行车的智能控制器。
控制器的设计品质、特性、所采用的微处理器的功能、功率开关器件电路及周边器件布局等,直接关系到整车的性能和运行状态,也影响控制器本身性能和效率。不同品质的控制器,用在同一辆车上,配用同一组相同充放电状态的电池,有时也会在续驶能力上显示出较大差别。
目前,电动自行车所采用的控制器电路原理基本相同或接近。有刷和无刷直流电机大都采用脉宽调制的PWM控制方法调速,只是选用驱动电路、集成电路、开关电路功率晶体管和某些相关功能上的差别。元器件和电路上的差异,构成了控制器性能上的不同。
2 、系统硬件电路设计
为了判断无刷控制器是否正常,测量控制器各个部分的输出信号是否符合标准,并且能够接收电机、转把、刹车的信号,判断这个控制器是否能实现其需要实现的功能,系统要检测控制器的转把和刹把是否有稳定的5 V电压输出,判断控制器的角度,以及判断霍尔控制线相序及与其对应的电机电源相序是否一致。只有位置传感器信号和绕组A,B,C正确连接才能使电机正常运行。图1为电路整体设计原理图,系统采用STCl2C5410AD单片机作为主要控制芯片。STCl2C5410AD系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8~12倍,内部集成MAX810专用复位电路,4路PWM,8路高速10位A/D转换,专门针对强干扰场合电机控制。

2.1 桥式整流电路
因为控制器工作需要的是直流电,所以需要加个整流电路。系统选用的是单相桥式整流电路。这种电路只要将四只二极管口连接成“桥”式结构,便具有全波整流电路的优点。
2.2 刹车与转把信号的检测
刹车信号高低电位的变化,是控制器识别电动车是否处于刹车状态,从而判断控制器是否给电机供电的依据。只要将刹车和转把信号的输出端接到STCl2C5410AD单片机的A/D转换端P16和P17,便能检测输出是否正常。[page]
2.3 控制器角度与相序的判断
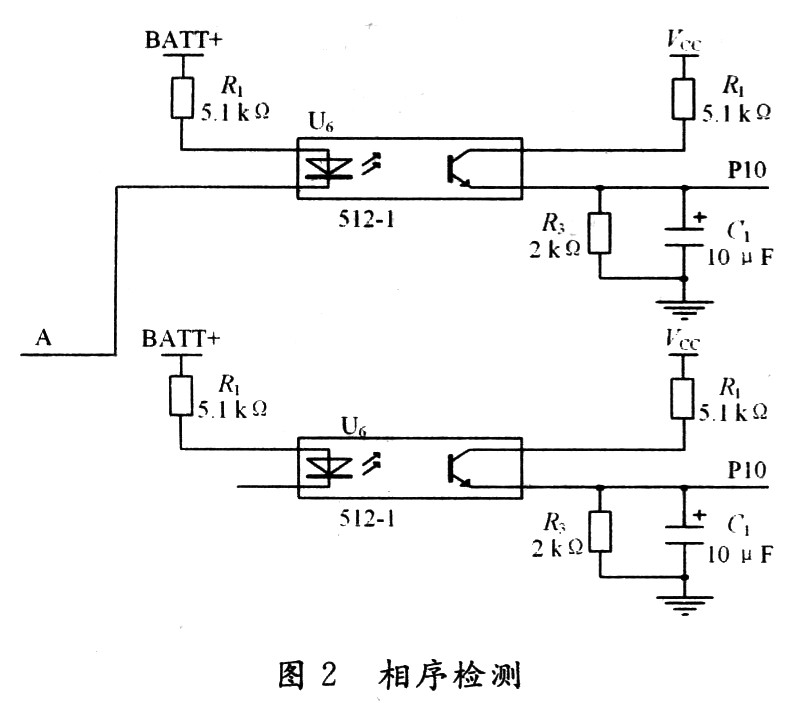
如图2所示,首先判断绕组电压A的输出,将两个光藕合器连到控制器的末级,与A的上下管并联起来,当A的上管导通时,A输出高电压,使下面的光耦导通。从而输出一个电压值,通过STCl2C5410AD单片机的A/D转换端P11口送到单片机中;当A的下管导通时,A输出低电压,使上面的光耦导通,从而输出一个电压值,通过STCl2C5410AD单片机的A/D转换端P10口送到单片机中。B和C用上面同样的接法。在输出时没有直接输出,而是通过光耦隔离后才输出,原因如下:光耦合器的信号单向传输,输入端与输出端完全实现了电气隔离,输出信号对输入端无影响,抗干扰能力强、工作稳定、无触点、使用寿命长、传输效率高。
3、 系统软件设计
3.1 总体设计流程图
总体设计流程图如图3所示。
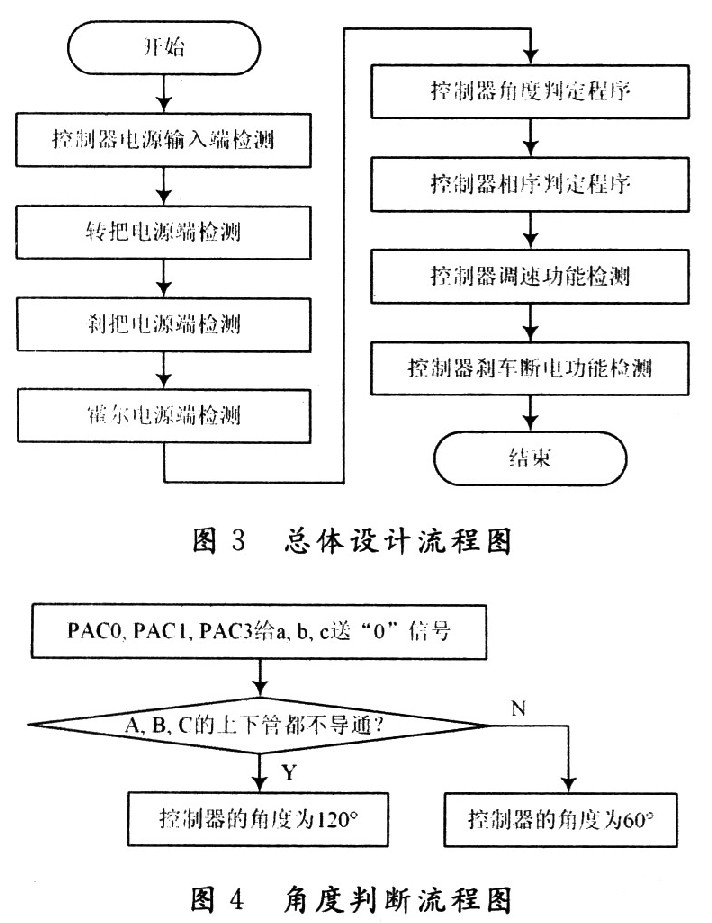
测量控制器输入端阻抗,当其大于10 Ω时为正常,否则电源输入端短路。转把、刹把、霍尔电源端的检测要保证输出电压大于4.5 V。控制器角度和相序的判断根据无刷真值表进行判断和检测,以下仅以控制器角度判断为例进行说明。
3.2控制器角度判断程序设计
由表1可以看出当a,b,c都取“0”,控制器角度为120°的时候,A,B,C上下管都不导通;而控制器为60°时A的上管和B的下管导通,这样便能根据a,b,c都取“0”时,A,B,C的输出信号来判断控制器的角度。流程图如图4所示。

4、 结语
系统设计采用STCl2C5410AD单片机作为控制芯片,电路简单,测量精确,很好地满足了电动车无刷电机控制器检测的各项需求,能够检测控制器接转把和刹把端是否正常,能够判断控制器的角度,霍尔控制相序以及与其对应的电机电源相序是否一致。希望该设计在将来的应用中得到更好的改进和完善。
责任编辑:gt
-
基于控制专用单片机的无刷直流电机控制器2008-09-26 6931
-
《无刷直流电机控制应用——基于STM8S系列单片机》2015-01-16 8863
-
一种用过PWM调速的无刷直流电机调速控制系统2016-01-05 5154
-
基于单片机的航模无刷直流电机调速控制系统2016-01-14 5370
-
单片机控制电机的一本书2016-10-11 19215
-
四轴飞行器无刷直流电机驱动控制设计的实现2018-10-08 4203
-
8098 单片机和伺服电机PWM 调速控制2010-04-13 952
-
应用8098单片机实现直流伺服电机PWM调速控制2010-08-06 947
-
无刷电瓶车单片机控制器原理与检修2009-01-21 6830
-
无位置传感器无刷直流电机的单片机控制实现2011-07-14 1312
-
基于单片机的PWM调速系统设计2011-11-02 1606
-
基于AVR单片机实现的直流电机PWM调速控制器2017-10-15 1744
-
基于51单片机的大功率直流有刷电机的PWM调速控制2018-02-07 15108
-
基于单片机直流PWM调速控制设计2021-11-23 1297
-
使用单片机实现直流电机的PWM调速控制原理图2024-12-10 1250
全部0条评论

快来发表一下你的评论吧 !
