

电子罗盘详解之原理和特点
今日头条
描述
电子罗盘的原理
三维电子罗盘由三维磁阻传感器、双轴倾角传感器和MCU构成。
三维磁阻传感器用来测量地球磁场,倾角传感器是在磁力仪非水平状态时进行补偿;MCU处理磁力仪和倾角传感器的信号以及数据输出和软铁、硬铁补偿。
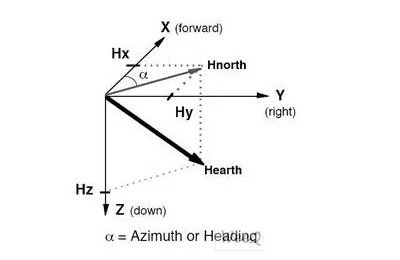
三维磁阻传感器采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在该方向上的地磁场强度。向前的方向称为x方向的传感器检测地磁场在x方向的矢量值;向左或Y方向的传感器检测地磁场在Y方向的矢量值;向下或Z方向的传感器检测地磁场在Z方向的矢量值。每个方向的传感器的灵敏度都已根据在该方向上地磁场的分矢量调整到最佳点,并具有非常低的横轴灵敏度。传感器产生的模拟输出信号进行放大后送入MCU进行处理。
1、当仪器与地表面平行时,仅用地磁场在X和Y的两个分矢量值便可确定方位值。
2、当仪器发生倾斜时,方位值的准确性将要受到很大的影响,该误差的大小取决于仪器所处的位置和倾斜角的大小。为减少该误差的影响,采用双轴倾角传感器来测量俯仰和侧倾角,这个俯仰角被定义为由前向后方向的角度变化;而侧倾角则为由左到右方向的角度变化。电子罗盘将俯仰和侧倾角的数据经过转换计算,将磁力仪在三个轴向上的矢量在原来的位置“拉”回到水平的位置。
标准的转换计算式如下:
Xr=Xcosα+Ysinαsinβ-Zcosβsinα
Yr=Xcosβ+Zsinβ
其中,Xr和Yr为要转换到水平位置的值,X、Y、Z为三个方向的矢量值,α为俯仰角,β为侧倾角。
电子罗盘的主要特点
1、三轴磁阻效应传感器测量平面地磁场,双轴倾角补偿。
2、高速高精度A/D转换。
3、内置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
4、内置微处理器计算传感器与磁北夹角。
5、具有简单有效的用户标校指令。
6、具有指向零点修正功能。lw
-
电子罗盘2014-07-08 4333
-
请问电子罗盘读出xyz的数据怎么用?2019-05-05 4418
-
移动机器人定向磁电子罗盘该怎么设计?2019-10-10 3444
-
电子罗盘功能怎么实现?2019-11-05 4679
-
电子罗盘电路2009-02-12 1195
-
什么是电子罗盘/数字罗盘2010-01-29 3921
-
电子罗盘在终端的应用2020-03-23 2074
-
电子罗盘应用广泛,浅析它的工作原理2020-06-11 4004
-
高精度罗盘的特点介绍_罗盘专题2020-04-16 3370
-
电子罗盘的分类与特点2020-05-07 3329
-
电子罗盘详解之与GPS导航区别2020-05-14 5965
-
电子罗盘是什么_电子罗盘工作原理2021-02-01 17057
-
磁传感器之电子罗盘详解2022-02-24 10408
-
电子罗盘详解2022-01-04 11359
-
电子罗盘全详解2022-03-09 8292
全部0条评论

快来发表一下你的评论吧 !
