

基于混沌同步系统实现永磁同步电机的状态观测器的设计
工业控制
描述
近年来,随着大功率电子器件的快速发展,永磁同步电机由于其高效性和良好的动态特性,在机器人、航空航天领域都得到了广泛的应用。但是由于其高速和弱磁区域控制受到较高的门限电压限制,大大限制了其应用。研究表明,永磁同步电机系统像很多非线性系统一样表现出多个稳态工作点,在一定条件下,可能出现极限环甚至混沌。所以研究永磁同步电机系统在稳态工作点附近的特性是近来研究的热点。大量的文献表明,永磁同步电机在动态特性上与混沌Lorenz系统具有相似性。
混沌系统是一种确定性系统,其运动轨迹敏感地依赖于系统的初始状态,即两个相同的混沌系统从非常接近的初始状态出发,经过一定的过渡时间之后,其运动轨迹将变得完全不同。这和现实生活中的一些复杂系统所表现出来的特性非常相似,即确定性系统所表现出的随机性。系统的混沌特性在很多情况下是人们不希望的,所以针对这些系统,研究了很多的控制方法来消除混沌现象。例如混沌的自适应控制、变结构控制、反馈控制等。此外在混沌同步方面自从Pecora和Carroll的文章(即P-C同步法)发表以来,混沌同步的研究也取得了巨大的发展。
本文正是由混沌同步的观点出发,设计出永磁同步电机的状态观测器,从而构造出非线性反馈控制器,实现永磁同步电机的控制。通过简单的线性系统的零极点配置方法,便可以获得期望的运行特性,而且避免了PID校正中由于参数不当而可能出现的混沌现象。
1 数学模型
永磁同步电机的d-q模型广泛地用于控制器设计。通过Park变换很容易将电机的交流变量转换成直流变量,极大地方便了控制系统设计。永磁同步电机的d-q模型可以表示为:
2 控制器设计
线性控制器尤其比例积分(PI)控制器在永磁同步电机速度控制中通常是首选的设计方案。简单地表述为双闭环控制系统:内环为电流环,外环为速度环。这里就以比例调节器为例,说明传统的线性调节器在永磁同步电机控制应用中的弊端。记Iqr和Idr分别为q轴和d轴的指令电流,而实际中Idr=0可以很容易得到保证,则采用比例调节器的d-q电压为:
为了得到不受驱动的Lorenz系统,可以使外部转矩TL=0,以及指令电流Iqr=0。可以得到如下的模型:
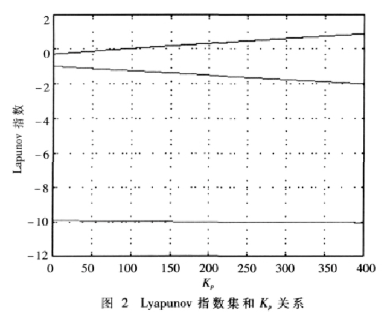
将(7)式代入(11)式,通过计算可以得到Lorenz系统族的Lyapunov指数集与反馈增益Kp的关系,如图2所示。图中计算所采用的方法同样是Wolf法,只不过此时Lyapunov指数集的计算与反馈增益Kp息息相关。
从图2可以看出永磁同步电机在较小的反馈增益 Kp(Kp《86)下能够保持稳定,随着Kp的增加,混沌化逐渐加剧。在控制系统设计时,一方面为了保证系统的响应速度,必须有较大的反馈增益;而另一方面,大的反馈增益又容易使系统混沌化。对于PI调节器,也有同样的结果。受非线性反馈的启发[14],可以引入如下的反馈:
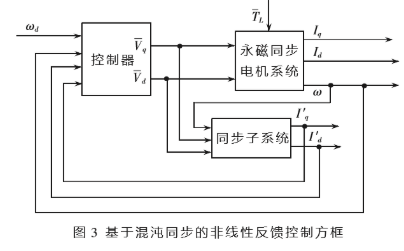
通过简单的零极点配置方法,闭环系统就能得到期望的性能。更进一步来说,实际系统中某些变量是不能直接测量的,例如现在研究的同步电机无位置传感器控制就是只能测量电机的角速度?棕。为此,可以构造基于混沌同步的状态观测器,估计出其他变量,从而可以实现控制。其结构框图如图3所示。也就是说,通过构造与永磁同步电机相关的同步子系统,将控制所需的电机状态变量用通过同步后的子系统变量代替,从而形成闭环控制。
本文首先介绍了永磁同步电机与混沌Lorenz系统在数学模型上的相似之处。永磁同步电机本身是不会呈现混沌特性的,但是随着电机外部力矩的变化及q轴电压的变化,就有可能产生混沌现象。传统的PI控制器在抑制混沌上作用又不是很明显。由此引入了非线性反馈控制,该控制器能够使非线性的电机系统转化为普通的一阶系统,从而可以通过线性系统的零极点配置达到期望的响应特性。考虑到实际系统的某些变量可能无法测量,在非线性反馈的基础之上,引入了基于混沌降阶同步的状态观测器,用估计值代替某些不可测量的变量,进而构成非线性反馈,实现了电机系统的控制。同时通过Lyapunov直接法证明了观测器的稳定性。仿真结果也证明了该控制器的有效性。
责任编辑:Gt
-
利用扩张状态观测器的交流永磁同步电机控制2025-06-09 361
-
利用滑模观测器实现永磁同步电机的无传感器磁场定向控制2024-07-13 881
-
基于滑膜观测器的永磁同步电机无感控制2023-05-24 3324
-
浅析基于滑模观测器的永磁同步电机SPMSM无位置传感器仿真2021-08-27 1762
-
基于滑模观测器的永磁同步电机控制系统设计2021-08-24 1584
-
基于降阶隆伯格观测器的永磁同步电机转子位置估算2021-04-02 6314
-
有偿求 基于滑膜观测器的永磁同步电机无位置传感器研究的例程2019-06-12 2218
-
基于二阶广义积分器的永磁同步电机定子磁链观测方法2018-10-19 3833
-
采用扩展卡尔曼滤波磁链观测器的永磁同步电机直接转矩控制2017-01-21 1025
-
永磁同步电机旋转坐标系滑模观测器设计研究_刘彦呈2017-01-08 1569
-
基于自适应滑模观测器的永磁同步电机无位置传感器控制2017-01-05 1206
-
基于混沌同步的永磁同步电机控制2010-11-22 636
-
基于滑模观测器的永磁同步电机矢量控制2009-08-10 1118
全部0条评论

快来发表一下你的评论吧 !
